Introduction
L’arrivée en cinquième année dans le cursus génie électrique, s’accompagne d’un conséquent projet de recherche technologique, visant à mettre en œuvre l’autonomie et les compétences techniques acquises au cours des deux années précédentes, mais également à développer des compétences dans des domaines non maitrisés.
Avec l’avènement des objets connectés dans le milieu domestique, l’industrie n’a pas attendu pour prendre ce tournant technologique, en intégrant des moyens de communications modernes et des outils numériques puissants pour améliorer et fiabiliser ses process. C’est dans ce contexte d’« usine 4.0 », que le projet réalisé par JOLY Killian et SALVAN Joris a été pensé, sous la supervision de M.MESBAHI et M.MBARKI.
Présentation du projet
Le but de ce projet est de pouvoir piloter une machine d’usinage à commande numérique 3 axes, depuis un automate Siemens S7-1200, au travers d’une carte Arduino Uno. L’intérêt de remplacer la commande d’origine par ce système, est d’offrir la possibilité de personnaliser l’utilisation de la machine 3 axes, tout en offrant un accès complet à la partie logicielle stockée dans les automates.
Après avoir réalisé la nouvelle commande numérique, la suite du projet consistait à réaliser un jumeau numérique de la machine 3 axes.
Conception de la nouvelle commande numérique
La machine 3 axes est composée de 3 moteurs pas à pas hybrides bipolaires, un par axe, avec un courant nominal de 2A. La carte Arduino Uno n’est pas dimensionnée pour fournir un tel courant, et ne possède pas assez d’entrées/sorties pour piloter 3 moteurs pas à pas directement. Il faut donc créer une carte d’interface entre l’Arduino et les moteurs.
La carte de commande doit également intégrer un port de communication Ethernet, afin de pouvoir dialoguer avec l’automate Siemens en protocole Profinet.
Afin de limiter les coûts du projet, la carte de commande a donc été pensée pour :
- Être alimentée directement par l’alimentation 24Vcc existante (les autres tensions sont recrées à partir d’alimentations linéaires embarquées) ;
- Pouvoir embrocher directement la carte Arduino Uno et son Shield Ethernet, et les alimenter ;
- Pour pouvoir connecter directement les câbles existants venant de la machine 3 axes ;
- Pour s’embrocher sur les 3 cartes d’interface des moteurs.

Programmation Arduino et Automate Siemens
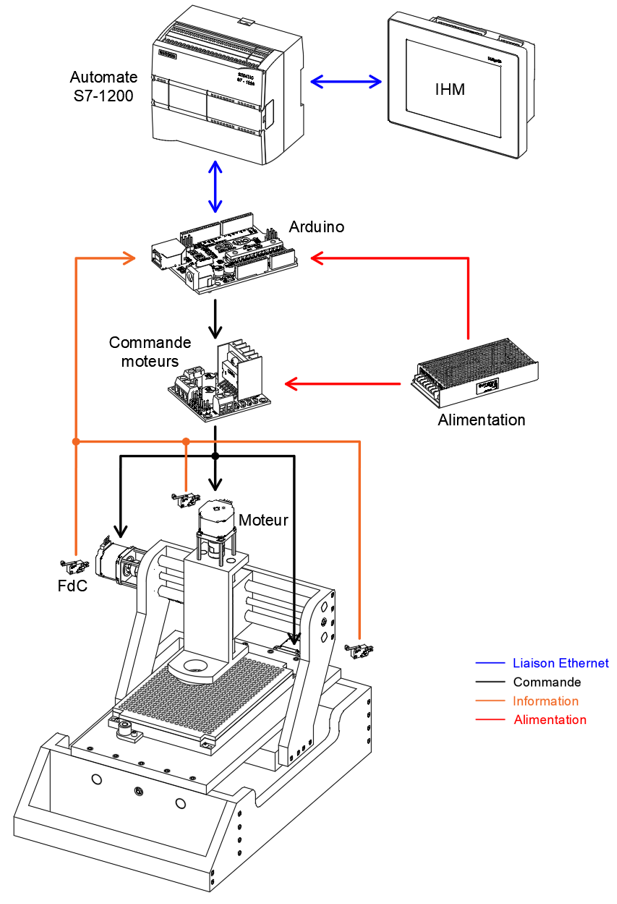
Un des principaux intérêts pédagogique de ce projet, est d’avoir créé une interface entre deux systèmes, qui ne sont pas conçus à l’origine pour dialoguer ensembles. La nouvelle commande numérique est composée d’une carte Arduino Uno, d’un automate Siemens S7-1200 et d’un IHM tactile. Ces appareils sont interfacés au moyen d’une connexion Ethernet avec un protole de communication Profinet.
La commande est ainsi pilotée par deux programmes, de langages différents, mais qui échangent par protocole Profinet :
- Un programme en «C» implémenté dans l’Arduino Uno : ce programme, développé dans l’IDE Arduino, sert d’interface entre l’automate Siemens et les moteurs. Son rôle principal est de récupérer les consignes de déplacement envoyées par l’automate, de les traiter afin de piloter les moteurs en rotation et en vitesse, puis de faire un retour d’informations à l’automate par communication Ethernet.
- Un programme en langage à contact «CONT» implémenté dans l’automate Siemens : ce programme, développé dans TIA Portal, sert d’interface entre l’IHM tactile et la carte Arduino Uno. Son rôle principal est de récupérer et traiter les ordres de déplacement saisis sur l’IHM par l’utilisateur, puis de les transmettre à l’Arduino par communication Ethernet.
Réalisation d’un jumeau numérique
Le jumeau numérique est une maquette virtuelle, représentant avec précision, le système réel à simuler. Ce jumeau numérique peut avoir plusieurs rôles. Il peut être utilisé en phase de conception d’un projet, pour valider la structure d’une machine ou d’un process complet, et valider un programme automate. Il peut également être utilisé en phase d’exploitation, pour suivre l’évolution du matériel et participer à la prédiction des maintenances selon les retours de différents capteurs (niveaux, usure, etc…).
La modélisation 3D de la machine 3 axes a été réalisée dans le logiciel Autodesk Inventor 2018.
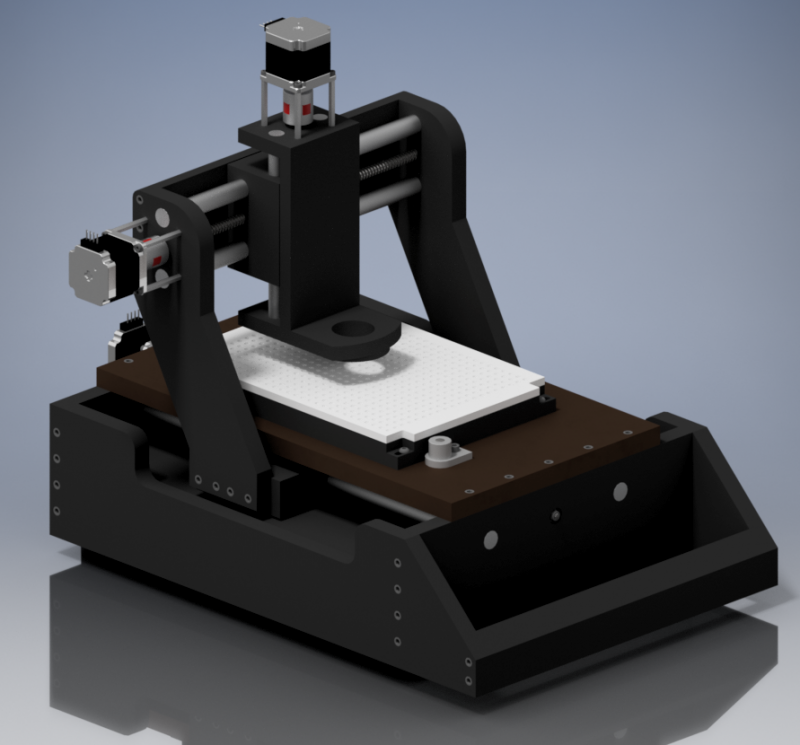
Hormis la modélisation 3D, qui ne représente qu’une petite partie du jumeau numérique, toute la conception a été réalisée dans le logiciel Siemens NX 11 sous son environnement Mecatronic Concept Designer.
La modélisation peut tout à fait se faire dans NX, mais nous avons utilisé Inventor par gain de temps car nous le maitrisions déjà.
Interfaçage des systèmes réels et virtuels
Pour faire fonctionner le jumeau numérique avec l’automate Siemens et le système réel, il faut utiliser un serveur OPC (Ole for Process Control), qui permet de faire dialoguer des systèmes d’automatisme (TIA Portal, Unity, etc…) avec des logiciels tiers comme Excel, des bases de données ou NX dans notre cas.
Grâce à cette interface, il est possible de commande le système réel directement depuis le jumeau numérique et inversement. Les retours de capteurs ou les commandes d’actionneurs peuvent ainsi agir directement sur le modèle numérique dans NX MCD.
Conclusion
Ce projet nous a permis d’exploiter et de mettre en concordance de nombreuses connaissances acquises dans les domaines de l’électronique analogique, numérique et de la programmation (informatique et automate). Nous avons également dû développer nos compétences dans la communication éthernet, et notamment en protocole Profinet.
L’interfaçage de deux langages de programmation nous a également imposé une grande rigueur dans notre organisation de projet, et dans la répartition des tâches au sein des différents programmes.
Enfin, la conception du jumeau numérique nous a permis de découvrir et de nous familiariser à une des révolution technologique de l’« usine 4.0 », en cours d’expansion dans les industries modernes.
Vidéo jumeau numérique
Ci-dessous une vidéo réalisée pour expliquer la mise en route du jumeau numérique avec le système réel. La partie de vidéo du temps 06:16 à 08:40, permet d’imager le fonctionnement du jumeau et le retour d’informations en temps réel à l’automate. L’IHM virtualisé dans la vidéo est identique à l’IHM réel du système.
1 commentaire
Bonjour,
Je travail actuellement sur la création d’un passerelle entre un automate physique et un jumeau numérique créé avec Unreal. J’ai trouvé votre article en faisans quelques recherches sur internet et j’aurai aimé savoir s’il était possible d’en s’avoir d’avantage sur vos travaux afin de m’aiguiller dans la réalisation de mon projet.
En vous remerciant par avance,
Esteban NICOLAY