Jimmy Portes, Fahel Cheraïta, Cherif Deen Karimou, étudiants en 5ème année de Génie électrique (GE5) à l'INSA Strasbourg, ont réalisé un projet de spécialité ambitieux portant sur l’automatisation industrielle intelligente. Ce projet, élaboré en collaboration avec la plateforme Usine du futur de l'école, met en avant les possibilités offertes par l’intégration de l’Intelligence artificielle (IA) et de la robotique pour répondre aux enjeux actuels des environnements industriels.
Un projet ancré dans l’innovation
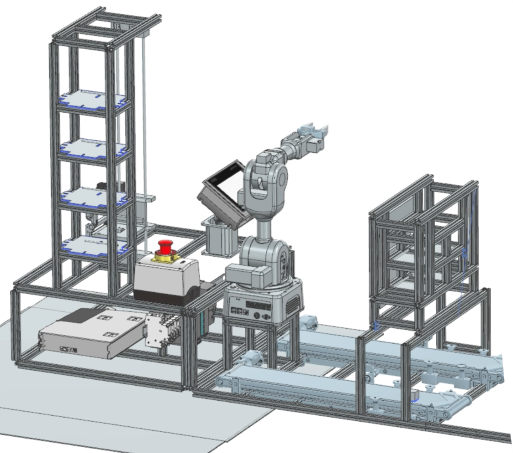
L’objectif était clair : développer une ligne de production automatisée capable d’assurer des opérations de tri, de manutention et de stockage de manière optimale. Pour cela, le groupe d’étudiants a utilisé le bras robotique collaboratif Niryo Ned 2, des convoyeurs équipés de capteurs infrarouges et un automate Siemens ET200SP . L’intégration de ces technologies a permis de concevoir une solution efficace et modulable.
Fonctionnalités clés du système
- Automatisation intelligente : utilisation de l’IA pour améliorer la précision et la fiabilité des opérations de tri.
- Gestion logistique optimisée : surveillance en temps réel des stocks et réapprovisionnement automatique.
- Interface homme-machine (IHM) : contrôle et suivi des opérations via une interface intuitive.
- Fiabilité électrique : respect des normes industrielles pour assurer la sécurité du système.

Robot et maquettes de stockage
Une approche centrée sur l’expérimentation et l’intégration
Le projet a été mené en plusieurs étapes :
- Analyse fonctionnelle et élaboration du cahier des charges.
- Programmation des modules via TIA Portal, notamment pour la communication Modbus TCP/IP.
- Intégration des éléments mécaniques, tels que les convoyeurs et la maquette de stockage vertical.
- Test et validation des différents scénarios de fonctionnement.
En complément de cet article, deux vidéos illustrent les différentes étapes du projet. La première vidéo détaille l’automatisation complète du système avec la première maquette de stockage, tandis que la seconde met en lumière le fonctionnement de la deuxième maquette de stockage.
Défis rencontrés et solutions apportées
Parmi les principaux défis, les étudiants ont rencontré des problèmes liés à la calibration du robot, à l’ouverture/fermeture de la pince du robot et à la communication entre les équipements pour assurer un enchaînement efficace des mouvements du robot. Grâce à une analyse approfondie et à des ajustements logiciels, des solutions qui garantissent la synchronisation des opérations ont été élaborées.
Jumeau numérique modélisé sur NX
Perspectives d’évolution
Ce projet ouvre la voie à plusieurs améliorations :
- Intégration de nouvelles technologies comme la vision par ordinateur pour un tri encore plus précis.
- Extension du système pour des applications à plus grande échelle.
- Optimisation des coûts pour faciliter son adoption dans divers environnements industriels.
Ce projet reflète l’engagement de l’INSA Strasbourg à former des ingénieur·e·s prêts à relever les défis technologiques actuels et futurs.
Remerciements
Nous souhaitons remercier chaleureusement nos encadrants, M. Lafont et M. Mesbahi, pour leur accompagnement précieux tout au long de ce projet. Nos remerciements vont également à l’équipe technique de la plateforme Usine du futur, dont le soutien technique a été essentiel pour la réussite de ce projet.