
Dans le cadre du parcours Systèmes embarqués et objets connectés (S-IoT) de notre cinquième année en Génie électrique (GE5) à l’INSA Strasbourg, nous avons mené un projet ambitieux : la conception et la mise en œuvre d’un essaim de robots holonomes.
Article rédigé par Aude Vrignaud et Théo Oliveira, GE5.
Ces robots, grâce à leurs roues Mecanum, sont dotés de la capacité à se déplacer dans toutes les directions, leur conférant ainsi leur caractéristique éponyme.
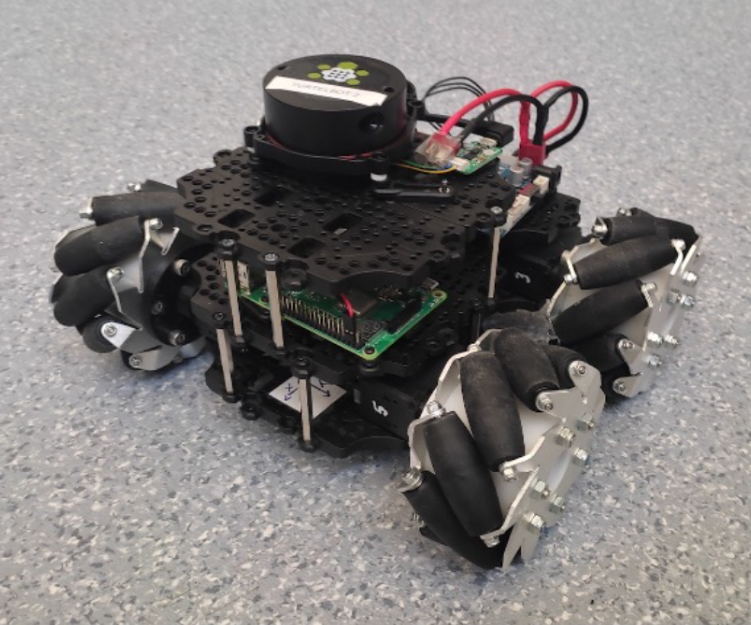
Premier robot Mecanum : Aramis
Trois robots, une seule mission
Baptisés Aramis, Porthos et Athos, en hommage aux célèbres mousquetaires d’Alexandre Dumas, ces trois compagnons ont été conçus pour travailler en commande collaborative, ce qu’on appelle un essaim. L’équipe a eu le loisir de décider d’elle-même l’application sur laquelle faire des tests, afin de démontrer les capacités de l’essaim.
Leur tâche principale ? Transporter des objets en équipe, en maintenant une formation en parfaite synchronisation. Ce choix pratique offrait l’avantage de ne représenter que très peu de conception mécanique, permettant ainsi de se concentrer sur la configuration des robots ainsi que leur programmation. Reliés par un tissu triangulaire tendu entre eux, ils sont capables de déplacer des charges légères au centre de la toile, tout en conservant une formation triangle stable, gage d’une coordination efficace.
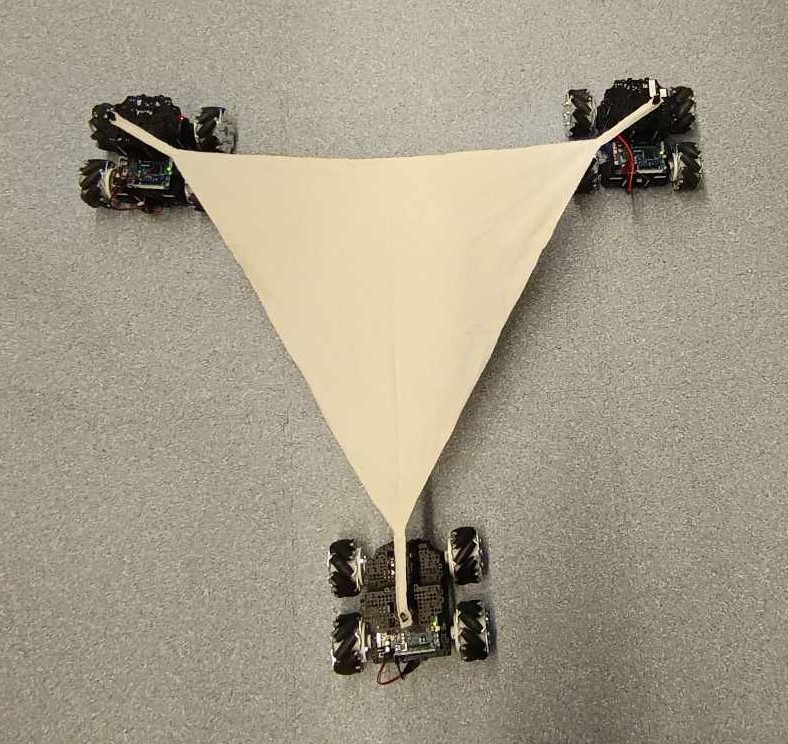
L’essaim de robots holonomes
Une configuration matérielle et logicielle adaptée
La base du projet repose sur l’utilisation de ROS (Robot operating system), une environnement logiciel essentiel pour contrôler des robots. Le premier robot que nous avons eu à notre charge a été appelé Aramis et nous a servi de modèle pour réaliser deux autres robots. L’un des premiers défis a consisté à transformer deux robots existants, basés sur un modèle TurtleBot3 Burger de Robotis, pour leur ajouter quatre roues Mecanum, augmentant ainsi leurs capacités de mouvement et correspondre au robot holonome faisant office de modèle.
L’essaim fait ses preuves
Au-delà de l’aspect technique, le projet a exploré des applications concrètes pour cet essaim de robots. Les premiers tests ont démontré leur capacité à transporter des objets variés. L’un des objectifs de notre projet était de choisir une application simple afin de démontrer leur efficacité et ainsi laisser présager leur utilité dans de multiples applications de l’industrie. Grâce à leur mobilité inhabituelle et saisissante et à une commande collaborative précise, ces robots pourraient s’avérer très utiles dans des domaines aussi divers que la logistique, la manipulation d’objets fragiles, ou encore le secours en milieu difficile d’accès.
Une source d’inspiration
Finalement, Aramis, Porthos et Athos ne sont pas seulement des robots ; ils incarnent une vision inspirante où la robotique en essaim pourrait révolutionner de nombreux secteurs. Ce projet est un bel exemple de la synergie entre innovation technologique, créativité et collaboration. Après ce lancement réussi, les mousquetaires de la robotique sont prêts à relever de nouveaux défis entre les mains des futurs élèves en génie électrique !