Dans le cadre de leur projet de parcours, Patrick Steiner et Stephen Lath, deux étudiants de la spécialité génie électrique en parcours usine du futur, ont eu l’opportunité de travailler sur le projet intitulé chariot autonome.
Patrick Steiner présente le travail accompli sur un chariot automoteur. Il développe aussi le jumeau numérique du chariot.
Ce projet évolue d’année en année en fonction des progrès faits par les étudiants et a pour objectif de devenir un Automated Guided Vehicle (AGV), c’est-à-dire un véhicule capable de se déplacer de manière autonome et d’éviter et/ou contourner des potentiels obstacles. Ce sont des technologies qui sont de nos jours de plus en plus utilisées par les industries, dans le cadre de l’automatisation de la logistique notamment.

Figure 1 : d’origine, le chariot se pilote avec la poignée. Il peut transporter une charge allant jusqu’à 700kg.
Cette année, le défi a été de déporter le contrôle du chariot vers un ordinateur de bord et de créer une interface utilisateur simple qui permettra le pilotage à distance du véhicule. Cela permettra aux étudiants suivants de se consacrer entièrement à l’élaboration d’un algorithme de pilotage autonome.
Dans un premier temps, le choix de l’ordinateur de bord s’est porté sur une carte Raspberry Pi. Celle-ci a l’avantage d’être très accessible et d’être ouverte à l’installation de modules libre accès. Les fonctionnalités ajoutées vont par exemple gérer les interactions entre différents capteurs ou bien permettre la programmation d’un site internet consultable par n’importe quel autre périphérique connecté au même réseau que l’ordinateur de bord.
C’est à ce moment là que le premier obstacle est apparu. En effet, la carte utilisée comme ordinateur de bord émet des signaux qui ne sont pas compatibles avec l’électronique présente sur le chariot. Ainsi, il a fallu développer une carte électronique d’adaptation, qui permet en plus de pouvoir choisir si on veut piloter le chariot avec l’ordinateur de bord ou avec la poignée d’origine. Cette carte possède aussi plusieurs emplacements pour connecter les capteurs, essentiels à la conduite autonome.
Le guidage fût un problème supplémentaire. Le chariot possède d’origine qu’un seul moteur pour entraîner les deux roues motrices. Cela rend donc impossible la rotation des roues dans des sens opposés. Néanmoins, la présence d’un différentiel autorise la rotation des deux roues à des vitesses différentes. Cette problématique a déjà été étudiée l’année dernière par les précédents étudiants, leur idée était de freiner une roue pour permettre la rotation du chariot autour de celle-ci. Pour cela, des étriers de freins pilotés par des vérins ont été installés. Cette année, l’ensemble de ce système a été renforcé.
Une fois que tous les éléments étaient pilotables par l’ordinateur de bord, les étudiants ont pu se consacrer à la programmation de l’interface utilisateur. Pour ce faire, ils ont réalisé un site internet qui contient les boutons présents sur la poignée, afin de piloter la vitesse du chariot et de pouvoir l’arrêter, ainsi que deux boutons supplémentaires pour piloter les vérins et donc permettre à l’utilisateur de commander la direction.
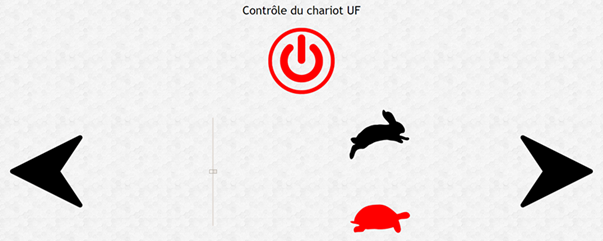
Figure 2 : Interface homme machine (IHM) du chariot autonome
Enfin ce projet a aussi été l’occasion pour Patrick et Stephen de découvrir le jumeau numérique. Cette étape du projet était essentiellement constituée de la modélisation en trois dimensions du chariot et de la simulation de ses mouvements dans son environnement de travail.
Crédit photo : Patrick Steiner
Texte : Patrick Steiner – recueilli par Tedjani Mesbahi
1 commentaire
Bonsoir pourrais-je avoir les caractéristiques du moteur pour une charge de 250kg? Ou alors pouvez vous m’envoyer votre cahier de charge ?