
Dans le cadre de leur Projet de Réalisation Technique (PRT) réalisé en 5ème année de formation d’Ingénieur en Génie Electrique par Alternance, les étudiants Robin RIBIOLLET et Valentin MATHIS ont eu le plaisir de réaliser une version améliorée d’un chronomètre pour compétition de planeurs F3F. Ce projet encadré par M. Renaud KIEFFER, a pour objectif de mettre en application les connaissances acquises par les étudiants lors de leur cursus d’ingénieur tel que l’électronique, la programmation de microcontrôleurs ou en encore la réalisation de circuits imprimés.
Déroulement d’une compétition F3F

Une compétition F3F se déroule généralement en haute montagne ou en bord de mer. Ce vol de pente consiste à être chronométré sur une distance de 1000 mètres soit 5 allers-retours de 100 mètres. Les pilotes passent les uns après les autres, évitant ainsi tout risque de collision . Le concurrent est placé au milieu de deux « bases » espacées de 100 mètres. Un juge à chaque base donne un « bip » au passage du planeur. Ce bip est relié à un chronomètre qui décompte le nombre d’aller-retour et s’arrête automatiquement à la fin du 5ème allers-retours. Le passage de l’ensemble des pilotes constitue une « manche ». Le meilleur chrono obtient 1000 pts et une règle de trois donne les points des autres concurrents. On enchaîne autant de manches que les conditions météo le permettent, le plus mauvais résultat étant enlevé à partir de la 4e manche et les 2 plus mauvais résultats à partir de la 15e manche, le tout permettant d’établir un classement.
3 étapes composent la compétition :
– La préparation du candidat : chaque candidat dispose de 30 secondes avant le début d’une course afin de réaliser les derniers réglages nécessaires puis de choisir le moment opportun pour démarrer sa course.
– La prise d’altitude : une fois la préparation achevée, le juge central lance le chronomètre. A partir de ce moment, le candidat dispose de 30 secondes pour prendre de l’altitude avec son planeur, passer une première fois par une balise et enfin franchir à nouveau cette même balise pour se diriger vers la suivante. C’est à ce moment précis que le chronomètre du candidat est déclenché. Dans le cas ou le candidat ne réalise par l’ensemble de la procédure énoncée durant les 30 secondes allouées, le chronomètre démarre automatiquement.
– Les franchissements des balises : le chronomètre démarré, le candidat doit désormais naviguer d’une balise à l’autre le plus rapidement possible jusqu’à avoir réalisé les 1000 mètres qui signent la fin de course.
Système Actuel

Les chronomètres de compétition F3F se composent actuellement de 3 parties distinctes :
– Une base principale sur laquelle sont affichées les différentes informations nécessaires comme le candidat actuel, le temps total d’une course, les différents temps de passage du candidat ainsi que les données météorologiques instantanées. Un juge est affecté à cette base afin de réaliser les réglages nécessaires (choix du numéro de pilote, choix du numéro de candidat), mais également pour prendre note de l’ensemble des données mesurées lors de chaque manche d’un concurrent.
– Deux bases déportées et distantes de 50m chacune de la base principale. A chacune des bases déportées est également affecté un juge. Ces derniers ont comme mission de valider le franchissement de leur balise respective par le planeur.
– Une station météorologique permettant les mesures de vitesse et de direction du vent. Ces données permettent aux candidats de refuser leur tour de passage si les conditions de vol ne sont pas respectées, ceci, dans un objectif d’équité des conditions de vol des candidats.
Améliorations du Système
Le projet réalisé par les étudiants de l’INSA Strasbourg a pour objectif de mettre en oeuvre un système similaire mais amélioré par rapport aux systèmes actuels.
En effet ces derniers possèdent des éléments pouvant être sujet à amélioration, à savoir :
– L’écran LCD permettant la lecture des différentes informations ne permet pas une lecture aisée en extérieur. Procéder à un affichage des données sur une autre technologie d’écran permettrait une meilleure lisibilité pour le juge assigné à la base centrale.
– La base principale est raccordé aux bases déportées de manière filaire. L’utilisation d’une solution sans-fil simplifierait le fonctionnement général du sytème et réduirait également son encombrement.
– A chaque fin de manche d’un candidat, l’ensemble des temps de passages sont inscrits de manière manuscrite. L’utilisation d’un enregistrement des données via une solution mémoire permettrait un temps de transition entre candidats raccourci.
RéalisationS
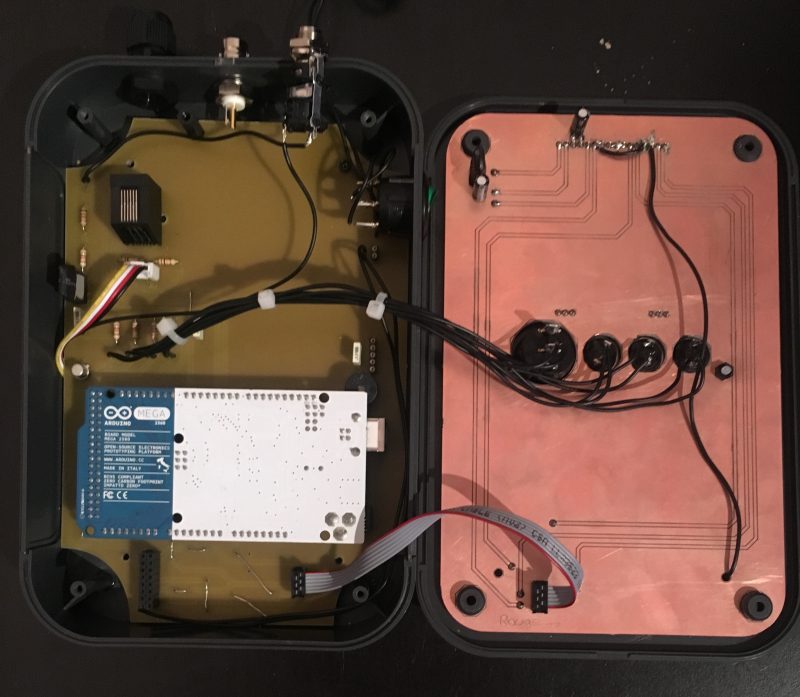
Boitier Principal
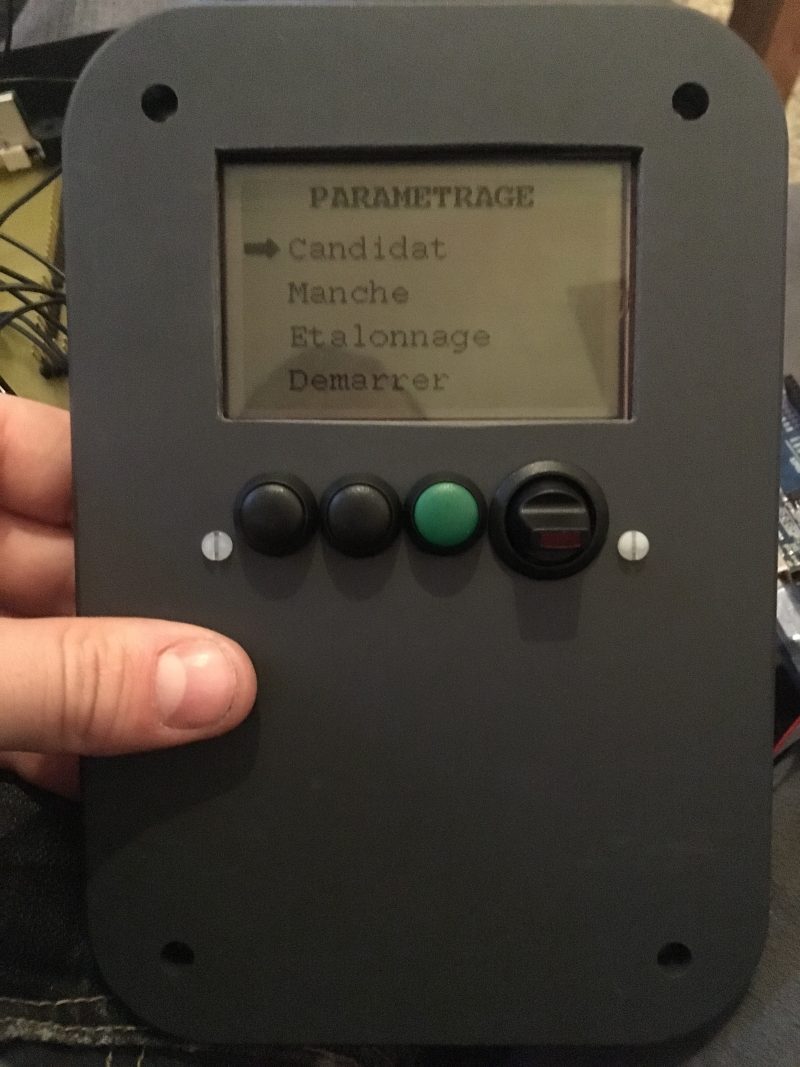
Le boitier principal du chronomètre amélioré est architecturé autour d’un microcontrôleur de type Arduino qui réalise la gestion du chronomètre, l’enregistrement des temps réalisés par chaque candidat sur sa mémoire EEPROM ainsi que l’affichage sur un écran utilisant une technologie transflective (qui permet d’obtenir un contraste dépendant de la luminosité ambiante. Par conséquent, plus la luminosité extérieure est importante, plus la lisibilité est optimale). A ceci s’ajoute une partie réception sans-fil via une technologie de type radiofréquence pour la réception de l’appui des boutons des différentes bases déportées. Enfin, l’intégration d’éléments sonores (buzzers), de l’antenne de réception et d’une batterie a également été étudié par les deux étudiants en charge du projet.
Boitiers Déportés


Les boitiers déportés ont quant à eux été réalisés sur une base de microcontrôleur de type PIC. Ce dernier, génère un code ASCII en sortie du module émetteur radiofréquence, qui est fonction du bouton sur lequel on effectue un appui. Ce mode de fonctionnement permet de reconnaitre au niveau de la réception du signal sur le boitier principal, le bouton, mais aussi la base qui a généré le signal. Pour compléter ce fonctionnement, des éléments de visualisation tel que des LED d’allumage ou des buzzers de retour d’appui ont été mis en place.
Station Météorologique
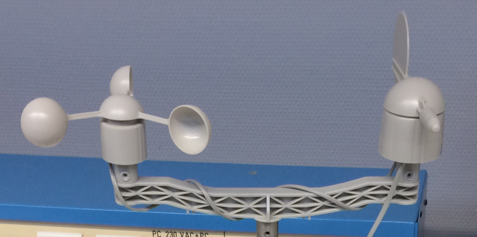
La dernière partie du projet réalisé consistait à mettre en place une station permettant d’obtenir la vitesse du vent ainsi que sa direction. Les étudiants en charge du projet ont opté pour une solution générale du type anémomètre / girouette reliés à la base centrale et au contrôleur Arduino qui effectue la gestion de ces capteurs.