Dans l’optique de notre spécialisation en usine du futur lors de notre 5ème année, nous avons pour objectif la prise en main des nouveaux outils qui vont révolutionner l’industrie 4.0. Nous présenterons ici la réalisation d’une maquette 3D sous le logiciel NX MCD de Siemens, ainsi que de son contrôle via le logiciel Matlab de Mathworks par le protocole OPC UA.
Par Samuel Barnola, étudiant en 5ème année de la spécialité génie électrique
La notion de jumeau numérique a une place importante dans l’industrie 4.0. Un jumeau numérique est une réplique numérique parfaite d’une machine, d’un process, voire d’une usine entière, dans les mêmes conditions que le système réel. Il permet de reproduire le fonctionnement et de simuler le fonctionnement en temps réel des équipements industriels afin de réaliser des tests, superviser un process ou encore d’optimiser l’efficacité d’un système.
Modélisation sur NX MCD (Siemens)
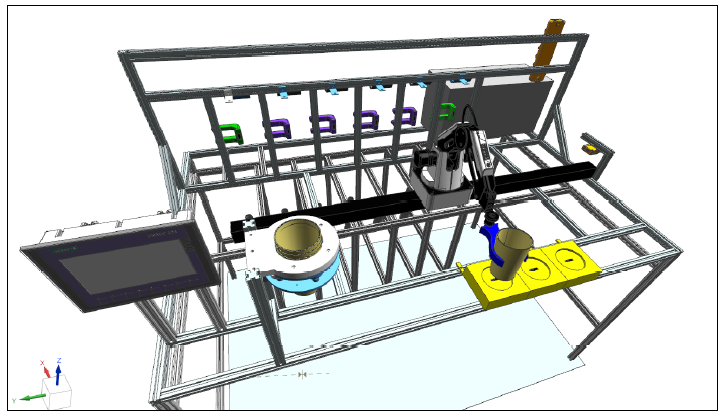
La partie modélisation est une fraction du projet de création d’une machine à cocktail. Après avoir créé les fichiers 3D de la maquette, il faut définir la physique des corps afin de pouvoir les simuler. Les liaisons entre objets doivent également être effectuées afin d’avoir un fonctionnement en simulation en adéquation avec le système réel.
Contrôle du jumeau numérique
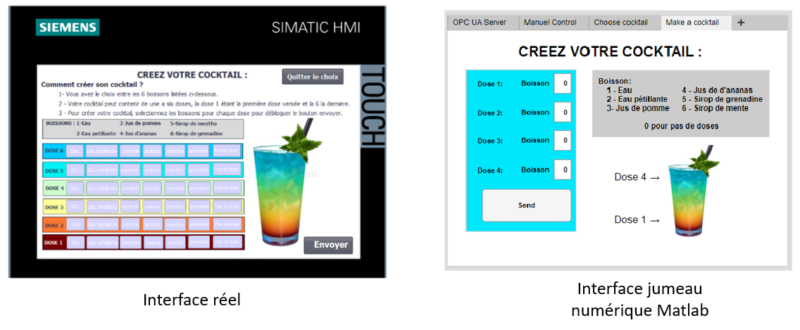
Le jumeau numérique peut être contrôlé par l’automate associé au projet. Le projet de cette année a pour objectif de contrôler notre système indépendamment de la machine à cocktail réelle. Le contrôle du jumeau numérique se fait par une application développée sur App Designer, un outil mis à disposition par Matlab. Cette application permet d’exécuter des codes Matlab à partir d’une interface graphique.
L’Interface homme machine (IHM) de notre système physique a été reproduit à l’identique sur l’application Matlab et l’exécution du code envoie des informations de manière à ce que le logiciel de simulation réagisse comme la machine à cocktail réelle.
La communication entre le logiciel de simulation NX MCD et l’application Matlab se fait par le serveur OPC UA de l’automate, qui est un serveur ouvert sur lequel un client peut se connecter directement. Lorsque Matlab et NX MCD sont connectés en temps que clients, ils ont la possibilité de lire et d’écrire sur ce serveur afin d’échanger les données nécessaires au fonctionnement de la simulation. Concrètement, l’application sur Matlab envoie sur le serveur OPC UA les valeurs des joints que le bras robotique doit prendre dans la simulation. La position du bras robot sur le rail, la gestion des entités (présence ou non de gobelets) sont également prises en compte.