Description du projet : Chariot autonome
Dans un monde où les objets connectés et l’informatique se standardisent, les entreprises n’échappent pas à cette tendance. Les usines et industries, après avoir incorporées l’informatique et l’électronique à – presque – tous les niveaux, commencent à viser l’objectif nouveau de la communication des objets et de leurs connectivités aux différents réseaux et à internet. Cette nouvelle ère industrielle dite « usine intelligente » ou « Usine 4.0 » a pour but de rendre les objets interconnectés entre eux, à internet, à pouvoir les commander à distance et à obtenir en temps réel des informations sur l’état des installations. De nos jours les industries visent donc à intégrer dans leurs structures ce que l’on appelle « l’Internet des Object » dit « IoT » en terme anglo-saxon pour « Internet of Things » qui est l’extension d’internet dans le monde physique.
C’est dans ce contexte d’Usine 4.0, que l’I.N.S.A. de Strasbourg a décidé d’être acteur notamment en intégrant cette thématique et ses problématiques associées dans le cursus de formation des ingénieurs en Génie Electrique. C’est dans ce cadre-là que s’est développé notre projet de chariot autonome. Celui-ci doit s’inscrire dans le principe de l’internet des objets et pour cela il sera contrôlable via ordinateur ou smartphone, donnera à tout moment son état de fonctionnement et son positionnement dans l’usine et pourra également être piloté par internet. Le trajet réalisé par le chariot est personnalisable et – grâce à divers capteurs – tient compte de son environnement.
Lancement du projet
Ce projet a été piloté par deux acteurs principaux qui ont été l’INSA et l’ECAM de Strasbourg. Ce dernier, initiateur du projet, a eu pour but de réaliser le côté management du projet de sa phase initiale d’analyse (« business plan » et plan de développement) jusqu’à simuler sa phase finale d’industrialisation pour 300 exemplaires (Validation produit, gestion des stocks et « marketing »). L’INSA a eu pour but de concevoir, à partir d’une prémisse de cahier des charges et d’un cadre de chariot – tous deux fournis par l’ECAM –, un prototype fonctionnel du chariot autonome. Cette phase de conception a donc compris une première partie d’étude de contexte et la finalisation du cahier des charges avec le client, une seconde partie d’étude technique : spécification des différents constituants que devra comporter le chariot ainsi que leurs dimensionnements et enfin une dernière partie de réalisation du kit grâce à des logiciels de conception assistée par ordinateur afin de modéliser et d’optimiser l’incorporation des différents éléments. Le travail des deux écoles a donc été conjointement réalisé afin d’effectuer ce projet de « kit d’automatisation » permettant de transformer un simple chariot comportant cadre et roues en un chariot autonome.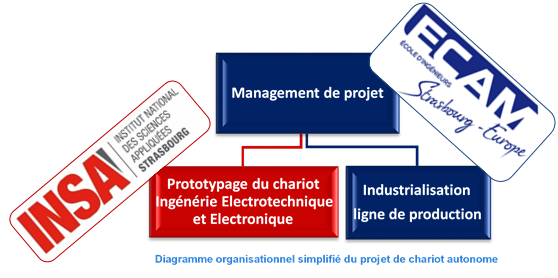
L’INSA a confié ce projet de conception à des étudiants en Génie Electrique de 5ième année dans le cadre des leurs projets de recherches et d’innovations. Durant ces projets les étudiants travaillent sur des thématiques d’avenir tout en approfondissant leurs connaissances sur des sujets divers et variés qui n’ont pas forcement été étudiés en cours. 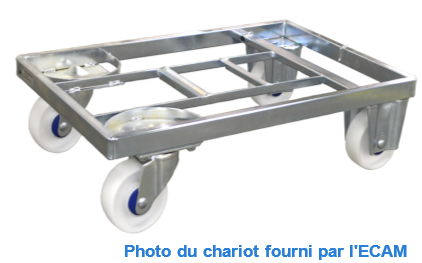 Contrairement aux cours magistraux cela permet également aux étudiants d’acquérir des compétences techniques et théoriques par leurs propres moyens afin de réaliser des objets techniques finalisés et fonctionnels.
Contrairement aux cours magistraux cela permet également aux étudiants d’acquérir des compétences techniques et théoriques par leurs propres moyens afin de réaliser des objets techniques finalisés et fonctionnels.
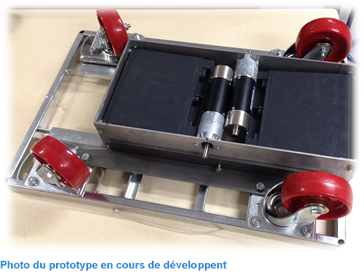
Le prototype du chariot autonome
Ce prototype de chariot devra remplir les fonctions principales suivantes :
- Mouvoir une charge
- Réaliser un trajet de manière autonome
- Être contrôlable manuellement par internet ou smartphone
La première fonction nécessite la présence d’une motorisation ainsi qu’une source d’énergie portable qui devront se conformer à des normes en vigueur dans l’industrie (pour le choix du type de batterie ou bien la vitesse des moteurs par exemple). Pour réaliser la deuxième fonction, le chariot doit d’une part connaitre sa position dans son environnement mais également tenir compte des changements possible de celui-ci, cela induit donc la présence d’un système de localisation et de capteurs d’obstacle. La commande manuelle quant à elle doit être facile d’utilisation et accessible à distance. Par conséquent nous avons réalisé un site web pour commander le chariot et le paramétrer depuis n’importe quel objet connecté.
Les détails de la partie commande et détection d’obstacle sont expliqués dans l’article : https://genie-electrique.insa-strasbourg.fr/project-electrical-engineering-smart-cart/
La réalisation du chariot a demandé aux étudiants d’acquérir un savoir-faire dans des disciplines variées comme l’électrotechnique et la mécanique pour le choix du système de direction, des moteurs et leurs dimensionnements, le choix des batteries, et la conception du cadre du kit, mais également l’électronique et l’informatique pour la réalisation de la commande du chariot et son contrôle via internet.
Les étudiants INSA ont été organisés en trois groupes de travail constitués deux personnes :
- Puissance, motorisation, alimentation, modélisation CAO et réalisation du cadre du kit
- Commande du chariot à partir d’une page web embarquée
- Localisation du chariot dans son environnement
Tous étant de la filière Génie Electrique, les deux premiers groupes sont étudiants en apprentissage et le troisième des étudiants de filière initiale.
Détails sur la réalisation de la partie puissance et de la conception du cadre du kit d’automatisation
Le but du kit d’automatisation est d’être facilement installable sur le chariot afin de le transformer en chariot autonome. Afin de minimiser la conception mécanique et de conserver la solidité de la structure du chariot pour soutenir la charge nous avons choisi de placer le kit en dessous de celui-ci. Du fait de la faible place disponible sous le chariot ce choix a induit une contrainte d’encombrement supplémentaire dans l’étude et notamment sur le dimensionnement des composants. Notre premier choix technique déterminant fût le choix du type de direction du chariot. Sur les deux possibilités de direction du chariot, une direction par crémaillère – type voiture – ou une direction par deux roues motrices indépendante, nous avons choisi la seconde pour sa facilité de réalisation d’un point de vue mécanique vis-à-vis de la première solution. Cette technique utilise donc la variation indépendante de vitesse de deux roues motrices afin d’assurer la direction du chariot et nécessite l’emploi de deux moteurs distincts.
Le cadre du chariot initial est capable de supporter une charge maximale de 250kg. La motorisation a donc été conçue pour pouvoir mettre en mouvement cette charge, en un temps maximal définit par le cahier des charges de 3 secondes, et d’assurer son transport sur sol quasiment plat (pente de 1° maximum). La vitesse nominale est déterminée par la norme concernant les véhicules autonomes dans l’industrie – NF EN 1526+A1– à la valeur de 2,5 km/h. Les résultats de l’étude mécanique ont montré qu’il fallait aux moteurs une puissance maximale de 150W.
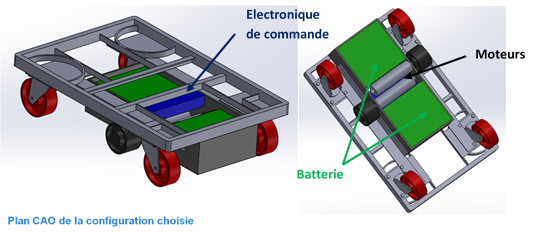
Nous avons réalisé une conception CAO afin de définir et d’optimiser au mieux la place disponible pour chaque élément à incorporer : moteurs, batteries et électronique de commande. En vue de l’encombrement disponible et de la puissance nécessaire nous avons opté pour la technologie de moteur brushless.
En effet cette nouvelle technologie de moteur, qui a vu naissance grâce à l’évolution de l’électronique de puissance, offre un rapport puissance/encombrement optimal.  De fonctionnement similaire au moteur à courant continu, il se dispense de collecteur mécanique à balai et utilise une électrique de commande, appelé également driver. Le fait de ne plus avoir de collecteur mécanique allège le moteur, le rend plus efficient et réduit grandement la maintenance à réaliser.
De fonctionnement similaire au moteur à courant continu, il se dispense de collecteur mécanique à balai et utilise une électrique de commande, appelé également driver. Le fait de ne plus avoir de collecteur mécanique allège le moteur, le rend plus efficient et réduit grandement la maintenance à réaliser.
Le prix du moteur lui-même est équivalent au moteur à courant continu mais il faut rajouter le prix de l’électronique de commande qui n’est souvent pas négligeable.
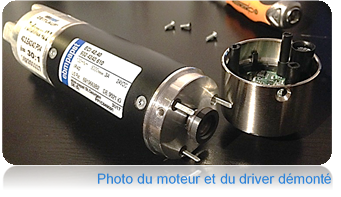 L’électronique de commande, constituée d’un onduleur triphasé en pont commandé par des signaux modulés en largeur d’impulsion (MLI), fonctionne sur le principe d’autopilotage.
L’électronique de commande, constituée d’un onduleur triphasé en pont commandé par des signaux modulés en largeur d’impulsion (MLI), fonctionne sur le principe d’autopilotage.
Celui-ci nécessite un retour d’information sur  la position du rotor. Cette fonction est ici réalisée par l’aimant de position et les capteurs à effet Hall situé sur le driver (cf. image).
la position du rotor. Cette fonction est ici réalisée par l’aimant de position et les capteurs à effet Hall situé sur le driver (cf. image).
Afin d’alimenter ces moteurs pendant la durée définie par le cahier des charges de 7h, deux batteries d’une capacité de 20Ah ont été placées. Le meilleur choix technique était pourtant des batteries Lithium-ion afin d’avoir le meilleur rapport capacité/poids mais également de maximiser le rapport  capacité/encombrement mais celles-ci étaient trop coûteuse pour la version prototype. Nous avons donc optimisé le rapport coût/encombrement et de ce fait utilisé des batteries de type plomb acide. Les batteries ont été choisies de par leur capacité mais également de par leur forme qui doit s’adapter à l’encombrement, disponible sous le chariot, défini par le plan CAO.
capacité/encombrement mais celles-ci étaient trop coûteuse pour la version prototype. Nous avons donc optimisé le rapport coût/encombrement et de ce fait utilisé des batteries de type plomb acide. Les batteries ont été choisies de par leur capacité mais également de par leur forme qui doit s’adapter à l’encombrement, disponible sous le chariot, défini par le plan CAO.
La commande du chariot est réalisée à partir d’une carte Arduino Méga reliée par l’intermédiaire d’une liaison série à une Raspberry PI 3. Ces deux cartes offrent un environnement de programmation modulable et adapté à la réalisation d’un prototype. Par la suite celles-ci seront amenées à être remplacées par des composants industrialisables.
Ce projet fut réalisé dans une collaboration sympathique et dans une bonne entente entre les différentes écoles et les différents groupes de travail. Cela nous a poussés à travailler en groupe, avec d’autres élèves d’une autre école, ce qui était une expérience enrichissante d’un point de vue personnel. Ensemble nous sommes parvenues à réaliser un système fonctionnel et répondant aux critères initiaux du client.
1 commentaire
Bonjour à vous,
Le pôle de développement PEPITEE (www.pepitee.eu) anime des projets industriels dans la région de Fessenheim.
Nous dessinons actuellement une ligne de production de containers à réfrigération passive qui nécessite la manipulation de panneaux isolants.
Votre chariot autonome retient tout notre attention. Pouvons nous établir un dialogue à ce sujet ?
Bien à vous,
Albert Cavalli
Président
+33 766 345 925