A l'INSA Strasbourg, 3 étudiants de 5ème année du département de génie électrique, parcours usine du futur, Azzouzi Majid, Denguir Oualid et Shao Pingyi ont récemment travaillé sur un projet d’option. Consacré à l'automatisation industrielle, ce projet avait pour objectif d'optimiser les opérations de logistique verticale en intégrant des bras robotiques. L'équipe a conclu ce projet au cours de l’année 2023-2024 avec des résultats prometteurs.
Azzouzi Majid, Denguir Oualid et Shao Pingyi sont ravis de partager le résultat du travail rigoureux et passionné qu’ils ont accompli.
Leur passion pour l’innovation les a guidés dans la conception et la réalisation d’un projet important qui redéfinit les normes de l’automatisation industrielle. Ensemble, ils ont exploité leurs compétences respectives pour créer un système avancé axé sur la logistique verticale, intégrant des avancées en intelligence artificielle et en robotique.
Au cœur de cette aventure se trouvent des bras robotiques programmés, des bras robot Niryo Ned 2, et un système de stockage vertical. L’équipe a travaillé en étroite collaboration pour élaborer une architecture détaillée, permettant une synergie parfaite entre ces composants et donnant vie à un système intégré qui promet de transformer fondamentalement les opérations industrielles. Ils ont également conçu un système de jumeau numérique permettant de simuler le comportement de notre maquette.
La programmation et l’intégration ont été des étapes cruciales du projet. Les étudiants ont utilisé des logiciels avancés( TIA Portal, NX, Simit), optimisé le code pour des performances maximales, et intégré les bras robotiques dans un environnement facilitant le transport fluide des articles entre différentes étapes du processus.

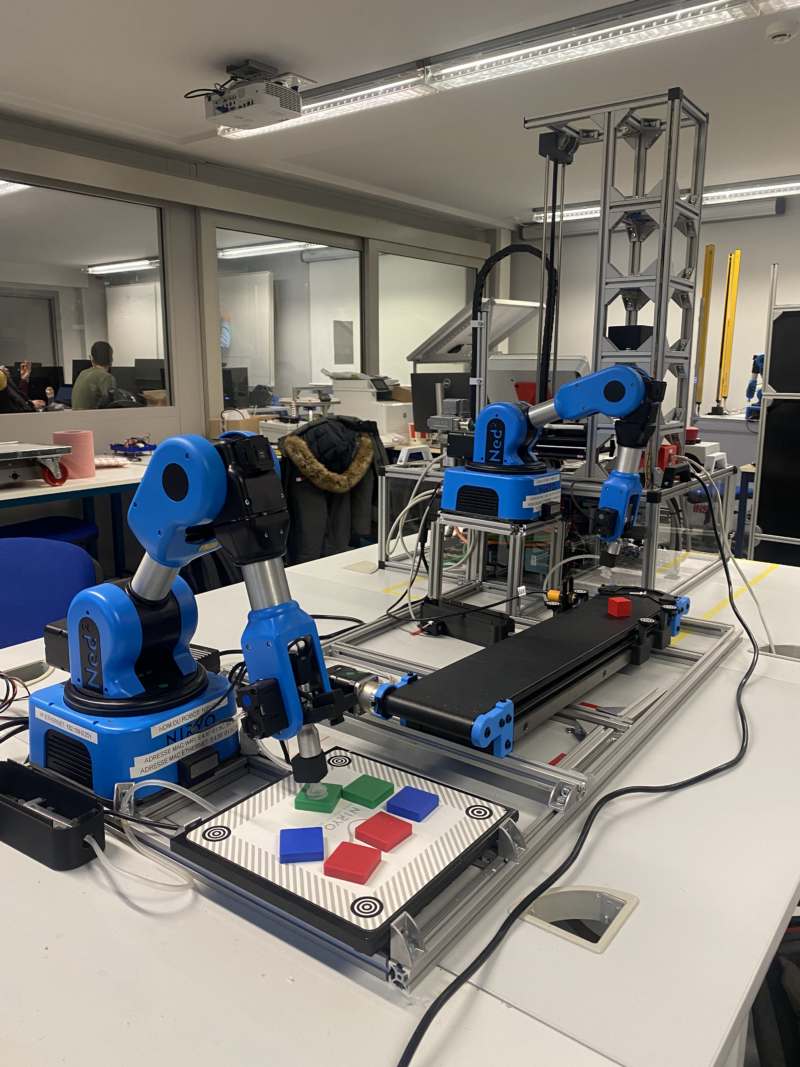
Concrètement, 2 bras robotique Niryo Ned 2, un convoyeur, une plate-forme de reconnaissance, et une maquette de stockage vertical ont été réalisés. Le but du projet est d’utiliser un premier bras robot équipé d’une caméra, commandé par une jetson nano, qui fait de la reconnaissance d’image et reconnaît la position ainsi que la couleur des objets.
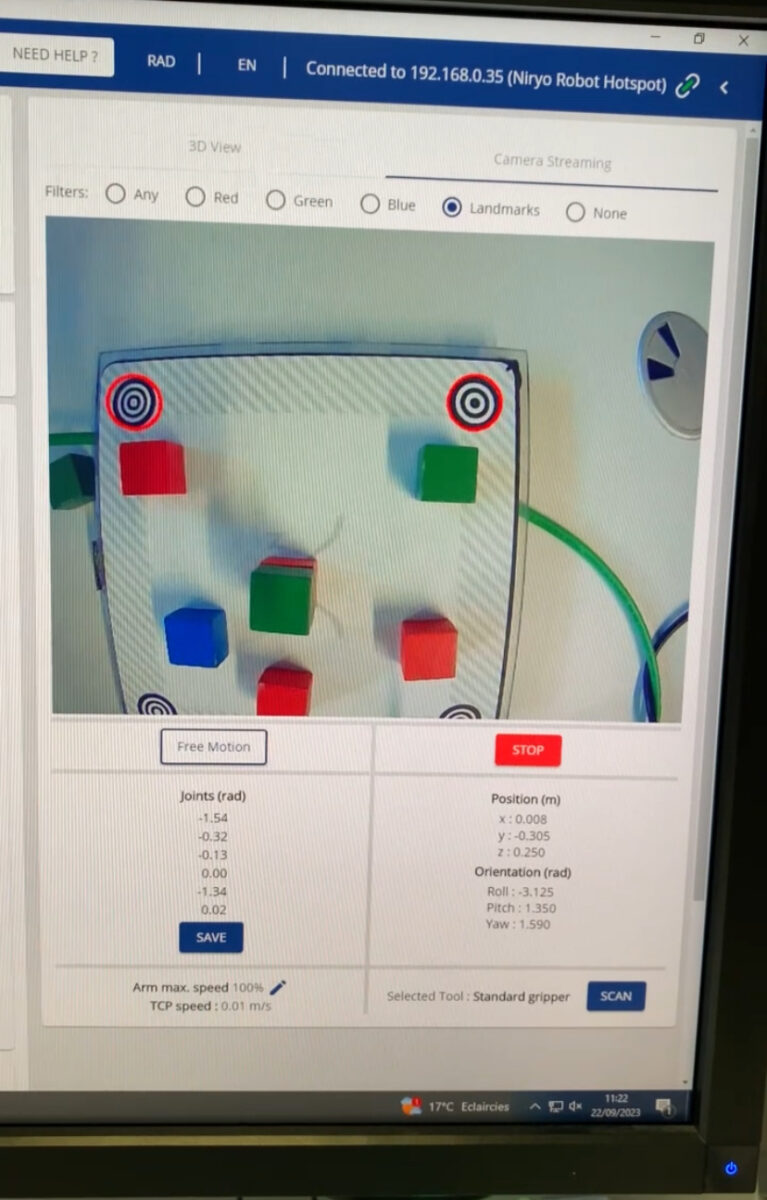
A partir de l’IHM, il faut sélectionner une couleur, par exemple rouge. Par la suite, le premier robot va prendre les cubes rouge et les déposer sur le convoyeur. Le convoyeur va les acheminer jusqu’au second robot, celui ci est commandé par un automate Siemens et en communication directe avec la maquette de stockage vertical. Le second robot va prendre le cube et le déposer dans un contenant dédié dans la maquette de stockage vertical. Et pour finir la maquette de stockage vertical va acheminer le cube jusqu’à l’étage dédié à la couleur.
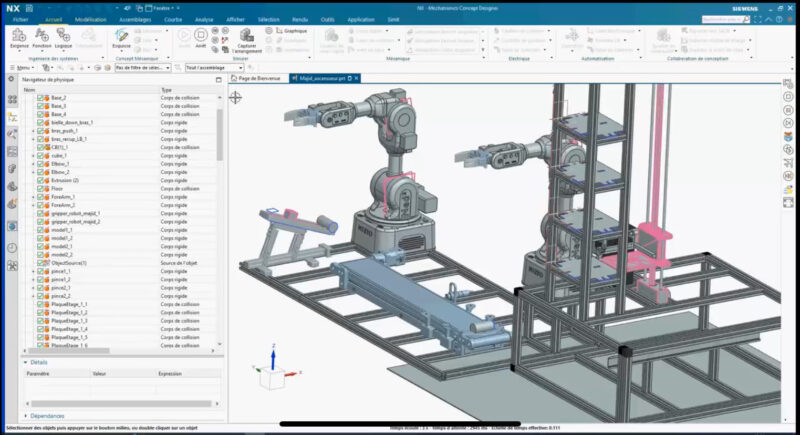
Un modèle 3D du jumeau numérique de la maquette a été conçu sur NX. Grâce à Simit, NX et l’automate peuvent communiquer. Ce jumeau numérique permet de visualiser les mouvements effectués.
Ce projet témoigne de l’engagement continu de l’INSA Strasbourg à repousser les frontières de la connaissance et à former la prochaine génération d’innovateurs.