
Baptiste Schuller et Cyprien Villeret, étudiants en 2ème année à l’INSA Strasbourg en spécialité génie électrique, ont travaillé durant le deuxième semestre 2021, dans le cadre des projets d'initiative personnelle encadrés (TIPE) sur un sujet pluridisciplinaire mêlant conception mécanique, électronique et programmation. L'objectif était de créer un système permettant de transformer un dérailleur de vélo et d'automatiser le changement de rapports. Explication par les deux étudiants.
Les écomobilités sont aujourd’hui en fort développement et le vélo en fait partie. Si les voitures sont aujourd’hui presque toutes équipées de boîtes de vitesses automatiques, ce n’est pas le cas des cycles.
Avec ce projet, nous avons voulu créer une sorte de kit adaptable sur un dérailleur de vélo classique pour automatiser le changement de rapport. Ainsi, l’utilisateur n’aurait plus à se soucier du changement de vitesses, gagnant en confort d’utilisation. La base que nous avons choisie est un dérailleur B’twin dix vitesses, pour son faible prix et sa disponibilité.
Le projet était composé de deux phases principales :
- électrisation du dérailleur : partie mécanique et électronique permettant de commander électriquement le mouvement du dérailleur.
- Automatisation du changement de rapport : ajout de capteurs et programmation permettant une gestion automatique du dérailleur.
phase 1 : électrisation DU DÉRAILLEUR
Nous avons choisi d’actionner le parallélogramme du dérailleur de manière assez directe avec le servomoteur. Pour la motorisation, nous utiliserons un servo-moteur standard.
Un autre de nos objectifs était de faire un système qui se monte sur le dérailleur sans avoir besoin de détruire de manière irréversible ce dernier. Finalement, seul le ressort d’origine du dérailleur devra être endommagé pour assembler le système.
Pour se faire, nous concevons des pièces en CAO pour les imprimer en 3D, elles seront fixées sur les pas de vis de réglage d’origine du dérailleur, qui ne servent plus.
-

- Dérailleur électrisé
-
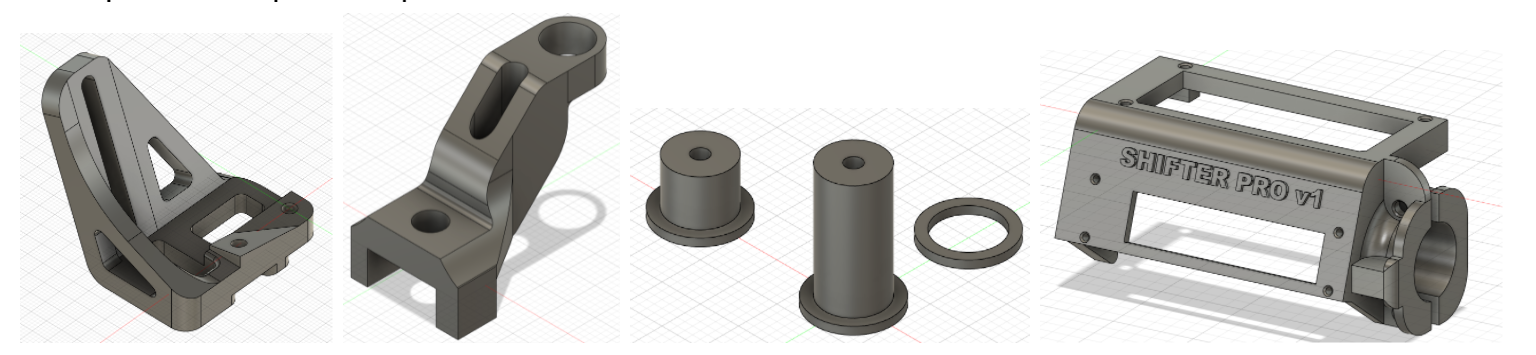
- Exemple de pièces réalisées sur Fusion 360
phase 2 : AUTOMATISATION DU CHANGEMENT DE RAPPORT
Le projet est basé sur un microcontrôleur Arduino nano programmé avec le langage Arduino.
Pour déterminer dans quel rapport il doit se trouver, notre système s’appuie sur la cadence de pédalage de l’utilisateur. Celui-ci prédéfini une cadence dans laquelle il veut rouler et le système essaye de la maintenir.
Pour ce qui est du captage de la cadence de pédalage, on procède ainsi : captage de la vitesse de rotation de la roue (capteur à effet hall + aimants) → produit par le rapport de transmission de la vitesse engagée → cadence de pédalage.
Le poste de commande situé au guidon offre un affichage et quelques fonctions de réglage :

le projet en VIDéO
Remarque : le prototype présenté ici n’est qu’une première version, comportant son lot de défauts et améliorations potentielles.
1 commentaire
Bonjour, nous vous contactons au sujet du TIPE sur la transmission automatique d’un vélo.
Nous sommes actuellement en première année de CPGE TSI et nous cherchons donc un sujet de TIPE. Ce système nous intéresse, serait-il possible de pouvoir en discuter avec les élèves ayant créé ce système ?
Cordialement