Paul Audin, Emilie Levillain, Camille Niola et Nimish Toory, étudiants de la spécialité génie électrique en parcours usine du futur ont réalisé ce semestre un solveur de Rubik’s cube. Partir de rien pour résoudre un Rubik’s Cube le plus rapidement possible, telle était la tâche de ces quatre étudiants de l’INSA Strasbourg, issus de parcours différents.
Projet de 5e année, une série hebdomadaire d’articles écrit par les étudiants en conclusion de leur travaux. [4/5]
Ce projet inédit proposé par Tedjani Mesbahi, maître de conférences à l’INSA Strasbourg, était la base pour permettre aux étudiants d’acquérir de nouvelles compétences en vision, jumeau numérique, mécatronique, mobilité électrique et en électronique.
Les étudiants ont su allier leurs compétences et leurs expériences de sorte à être efficaces pour essayer de compléter ce projet. Venant d’une prépa, d’un DUT ou d’une première année à l’INSA, leurs parcours respectifs ont été leur véritable force.
Les étapes du projet
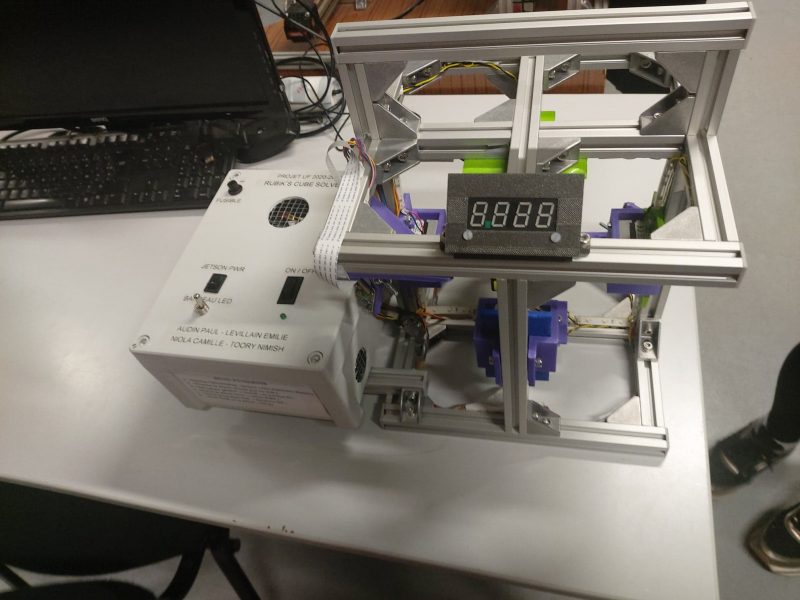
Mettre en place la structure mécanique du robot solveur de Rubik’s Cube fut l’étape fondatrice du projet. En effet, construire un support capable de soutenir six moteurs et le Rubik’s Cube en évitant tout problème dû aux possibles vibrations a demandé une réflexion préalable. Une réalisation 3D a donc tout d’abord été réalisée de manière à valider les choix de structure et des différentes pièces permettant de maintenir les éléments nécessaires à la résolution et au maintien du casse-tête. La majorité des pièces nécessaires à cette réalisation ont été imprimées en 3D.
La partie du projet visant à reconnaître les couleurs a été développée autour de caméras Pi v2, initialement prévues pour être utilisées avec des cartes Raspberry Pi mais compatibles avec la NVIDIA Jetson Nano utilisée dans ce projet. Deux caméras ont été nécessaires, chacune d’entre elles pouvant traiter trois faces du cube. Plusieurs approches de traitement ont été considérées, et celle finalement retenue est l’échantillonnage de couleur à des coordonnées spécifiques de l’image. Certaines faces étant cachées aux deux caméras, un algorithme fut développé pour permettre de les déterminer en fonction des autres faces. L’ensemble des codes a été programmé en langage Python.
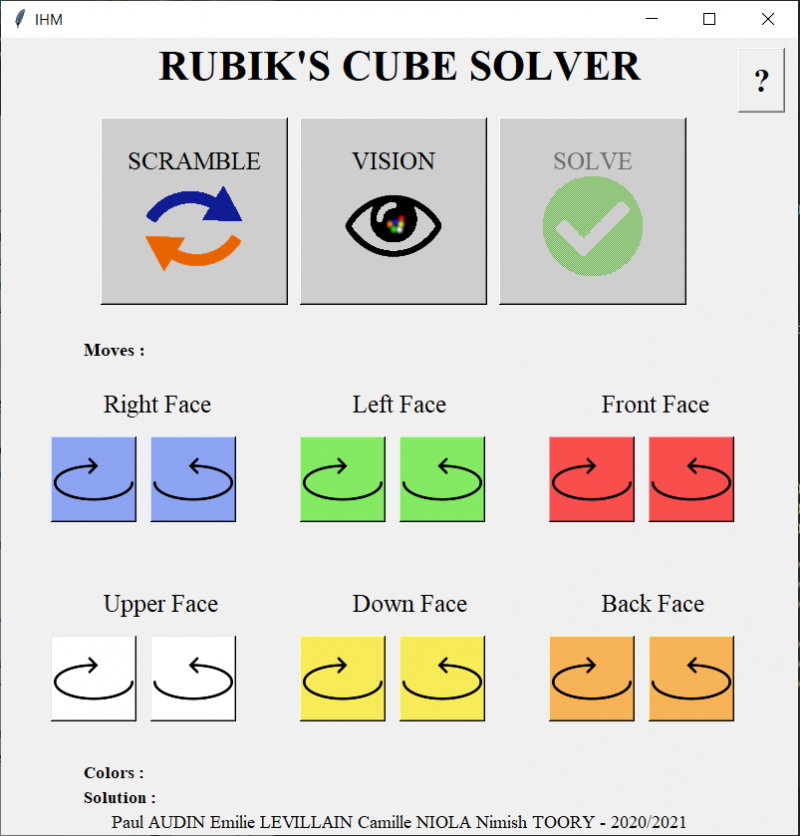
Les étudiants devaient aussi réaliser le jumeau numérique du cube c’est-à-dire une représentation digitale de ce dernier capable de suivre exactement les mouvements du cube et de se mettre à jour en temps réel. Une interface homme machine (IHM) a été réalisée afin de pouvoir mélanger le cube soit de façon aléatoire, soit manuellement en contrôlant chaque moteur séparément.
Dans l’objectif de rendre le robot autonome en électricité, les étudiants ont dimensionné une batterie adaptée pour fonctionner une demi-journée lors d’événement tels que les portes ouvertes de l’INSA Strasbourg. Avec un système de connexion, la maquette peut être branchée sur batterie, sur secteur ou sur alimentation stabilisée pour les phases de tests.
La partie électronique était l’une des dernières étapes : le but était de créer un lien entre les différents composants et de pouvoir contrôler les caméras, les drivers moteurs, les moteurs et le bandeau de leds. Lorsque le robot a été fonctionnel, l’ensemble des composants a été mis en boîte et les trajectoires des câbles ont été optimisées afin d’améliorer l’aspect esthétique du projet.
Les étudiants tiennent à remercier chaleureusement leurs professeurs encadrant, Jérôme Hugel et l’équipe des techniciens de la plateforme génie électrique pour leur aide précieuse, sans laquelle ce projet n’aurait pu aboutir.
Vidéo de démonstration :
Texte : Paul Audin, Emilie Levillain, Camille Niola et Nimish Toory
2 commentaires
Bravo
Bonjour, votre solveur de rubik’s cube est impressionnant, je suis actuellement étudiant en CPGE filière PTSI, dans le cadre de mon projet de TIPE. J’aimerais me renseigner, avoir plus du détails sur votre machine afin de pouvoir réaliser une étude effectuée par mes soins sur l’ensemble du mécanisme, serait-il possible de prendre contact avec vous ?
Cordialement
SERMET Benjamin