
Dans le cadre du projet de spécialité S-IoT (Systèmes embarqués et Internet des Objets), Iona Guth et Maya Pivert, étudiantes en 5e année de génie électrique, se sont lancé le défi de concevoir et commander un robot mobile type TurtleBot3 de grande taille.
Walter, un robot mobile aux fonctionnalités similaires à celles d’un Turtlebot (robots utilisés par les étudiants pour apprendre les commandes robotiques), a été conçu pour répondre à une problématique spécifique dans le contexte des festivals. Pour en apprendre davantage sur l‘origine du projet et suivre les étapes de sa conception, visionnez la vidéo présentée par ses créatrices :
Le fonctionnement technique de walter
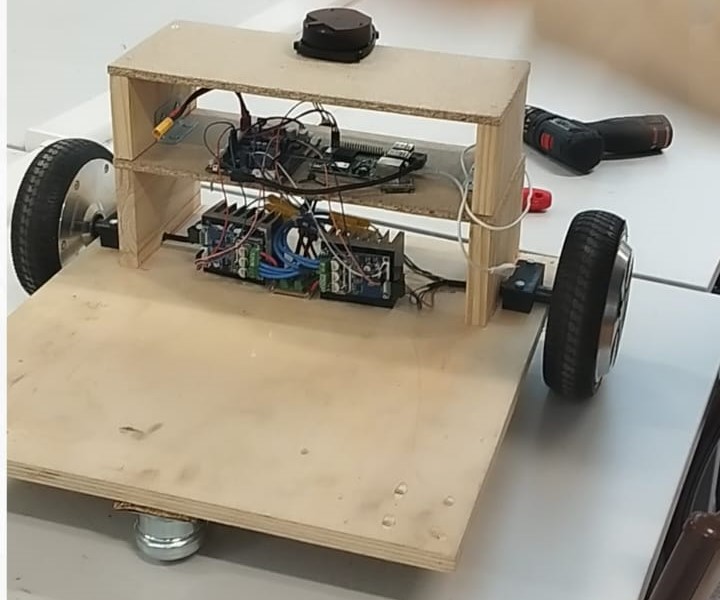
Photographie du robot Walter
La Raspberry Pi et l’Open CR contrôlent le robot, tandis que nous utilisons le système d’exploitation ROS (Robot Operating System) pour communiquer avec lui. Afin d’obtenir une commande totalement identique à celle d’un Turtlebot, certaines fonctions ont nécessité des adaptations, notamment celles liées au déplacement du robot.
Concrètement, sur ROS, le robot accède aux topics pour recevoir les commandes. Les roues d’hoverboard, équipées de moteurs triphasés DC Brushless, sont régies par une modulation de largeur d’impulsion (PWM), où le rapport cyclique est proportionnel à la tension, dictant ainsi la vitesse. Cette méthode diffère des moteurs intelligents utilisés dans les Turtlebots, qui peuvent être directement contrôlés en vitesse et position. Ainsi, un programme a été élaboré pour établir une équivalence entre les deux systèmes, permettant au robot d’être commandé via le même topic.
En outre, le capteur de courant mesure la consommation d’énergie du robot, tandis que le LDS-02 assure la détection d’obstacles.
un projet en partenariat avec des lycéens
Les lycéens de la classe STI2D STEM (Sciences et technologies de l’industrie et du développement durable – Science, technology, engineering and mathematics : sciences, technologie, ingénierie et mathématiques) du lycée Chevrollier à Angers ont contribué à améliorer le robot en réalisant des fonctions complémentaires. Ils ont, par exemple :
- Favorisé la communication avec l’utilisateur en créant une interface représentant un visage et ont ajouté une fonction permettant d’appeler le robot.
- Créé une application permettant de contrôler le robot à distance depuis un smartphone, tout en analysant la consommation du robot.
- Calculé le volume d’eau restant dans la cuve (dans le cadre d’un service d’eau en festival) et l’ont communiqué via une application.
- Intégré deux bras robotisés pour le service des verres.
Logo STEM Chevrollier
Lodo STI2D Chevrollier
Nous sommes extrêmement fières de leurs réalisations, et nous leur sommes très reconnaissantes pour leur travail. Partager ce projet avec eux a été un réel plaisir. De plus, nous aurions également aimé participer à ce type de projet pendant notre passage au lycée. Nous espérons que cela suscitera chez eux l’envie de poursuivre des études d’ingénieur.
Vous pouvez découvrir leur travail en suivant les liens ci-dessous :
- https://youtu.be/IOjLualTCeQ?si=5XmZAPKHVrI85vdk
- https://youtu.be/0pH2mEH65Qo?si=fNp3JzWj5ko1ms4h
- https://youtu.be/W7BP6fH-3Ak?si=XFmVIindrxsBISAr
- https://youtu.be/LKYpdCNrrB8?si=woGIpa_SJCCDOcs-
- https://youtu.be/1MNuKrM-m-8?si=5mQYrNN65KujQw60
Les perspectives envisageables
Avec les bases établies, d’autres étudiants auront la possibilité de reprendre et d’améliorer le projet au fil des années. Ils pourront réimplémenter des fonctionnalités telles que le suivi de personne, comme indiqué dans la vidéo. Ce dernier pourrait trouver des applications dans les festivals, les hôtels, les aéroports, la cartographie, et être exploité dans l’industrie.
Walter sera aussi exposé aux portes ouvertes de l’INSA Strasbourg le 3 février 2024. Venez le rencontrer !
Maya PIVERT, Iona GUTH
Remerciements :
Nous tenions à remercier les professeurs qui ont encadré le projet : M. Durand, M.Boyer, M. Hubé, M. Kiefer, Mme Hammann, ainsi que M. Dourdet pour la vidéo, M. Ritzenthaler pour la structure mécanique, M. Grandemange et M. Pavot pour leurs aides.