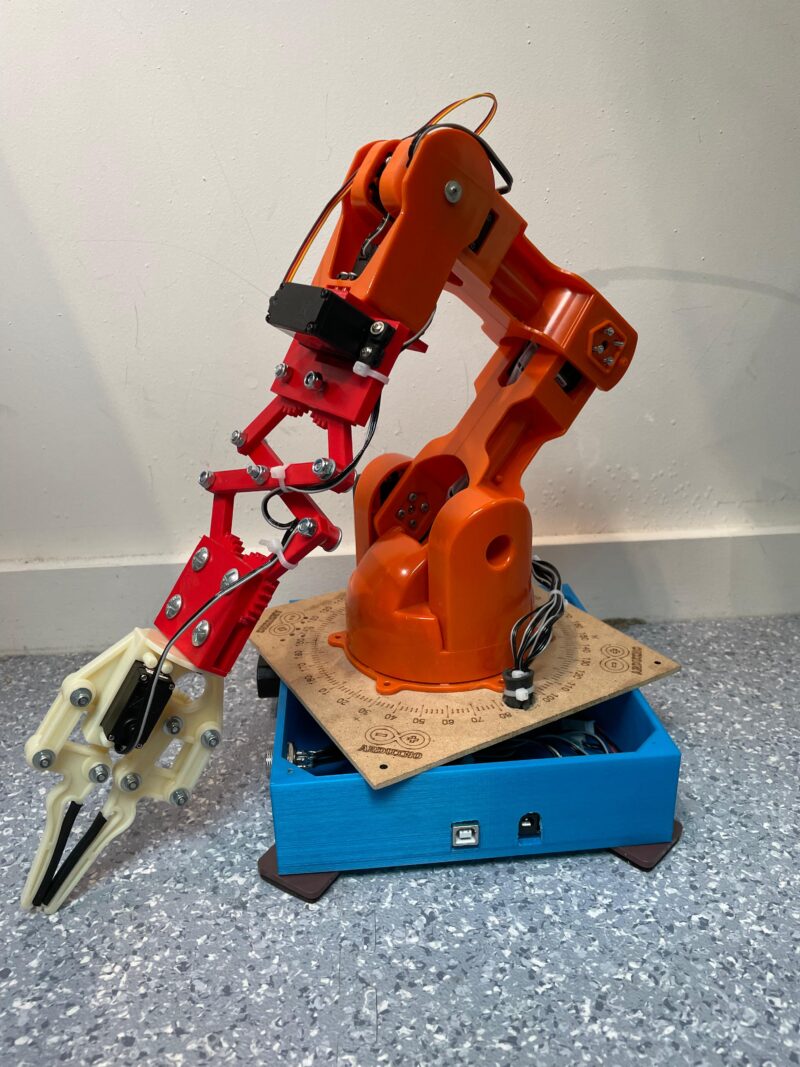
Mathis Fanget et Ali Badaoui, étudiants en deuxième année de génie électrique (GE2) à l'INSA Strasbourg ont réalisé, dans le cadre de leur projet Travaux d'initiative personnelle encadrés (TIPE), la remise en état d'un bras de robot Braccio Arduino ainsi qu'un système d'allongement du bras de robot en guise d'amélioration. Ce projet a été réalisé aux côtés de monsieur Damien Flieller, enseignant en GE. Ce projet a pu être mené à bien grâce à l'impression 3D de diverses pièces à l'aide d'une imprimante 3D ainsi qu'à l'utilisation de divers outils électriques comme des shields, câbles, boutons, joysticks ou encore une carte Elegoo UNO R3.
Allongement d’un bras de Robot
Dans le cadre du module TIPE en deuxième année de formation à l’INSA de Strasbourg, spécialité Génie Électrique, les étudiants sont amenés à réaliser un projet en binôme. Dans notre cas, le projet consistait en la remise en état d’un bras de robot Braccio ainsi qu’à la mise en place d’un système d’allongement. Le but de cet allongement est de permettre au bras de robot d’être encore plus performant. Ainsi, leur travail s’articulait autour de trois points principaux :
- Remise en état du bras de robot Braccio Arduino.
- Mise en place d’un système d’allongement.
- Mise en place d’un système de contrôle du robot (manette, carte Elegoo UNO R3).
Remise en état du bras de robot
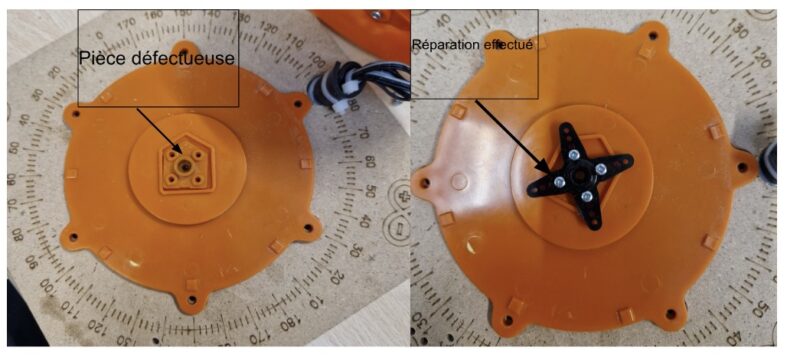
Tout au long du projet, les étudiants ont travaillé sur la remise en état du bras de robot. En effet, 3 articulations au niveau du bras de robot se sont révélées défectueuses (apparues les unes après les autres). Le problème ici était qu’initialement, une pièce du robot ne transmettait plus le couple du moteur car elle avait perdu toutes ses dents. Pour remédier à cela, la solution que mise en œuvre a été la suivante :
Un palonnier a été fixé au bras de robot à l’aide de vis et d’écrous, puis vissé au moteur, ce qui a permis de transmettre le couple nécessaire au bras de robot pour qu’il puisse bouger. En image, un exemple de la résolution de ce problème :
système d’allongement du Bras
Initialement, la pince était directement liée au bras du robot, ce qui faisait que la distance maximale pour pouvoir attraper des objets était limitée à la longueur du bras du robot. En image, le bras du robot à son « état initial », c’est-à-dire tel qu’il a été récupéré :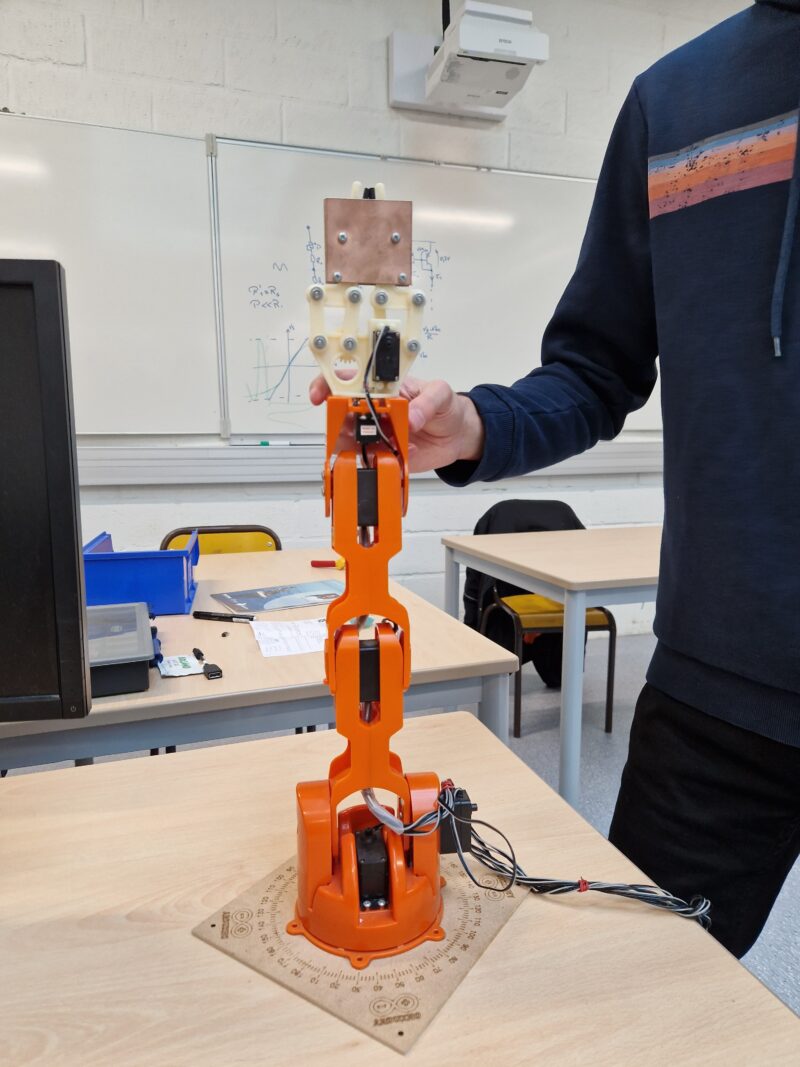
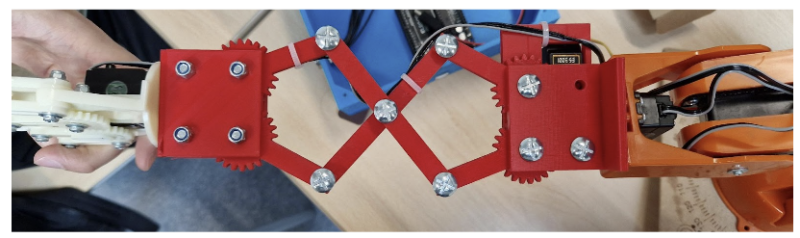
Ainsi, pour rendre le bras de robot plus polyvalent, les étudiants lui ont un système d’allongement. Avec ce système d’allongement du bras de robot d’une distance maximale approximative de +20 cm, il est donc possible d’attraper des objets sur une surface plus large. Ce système d’allongement a été conçu de la manière suivante :
Plusieurs pièces ont été modélisées en 3D, que le binôme a ensuite imprimées à l’aide d’une imprimante 3D, puis a assemblé l’ensemble des différentes pièces à l’aide de vis et d’écrous pour obtenir le système d’allongement complet. Pour toutes les mesures, ils ont utilisé un pied à coulisse afin de les effectuer de manière très précise. Ces mesures ont donc permis de modéliser toutes les pièces en 3D.
En image, le système d’allongement du bras de robot :
Système de contrôle du bras
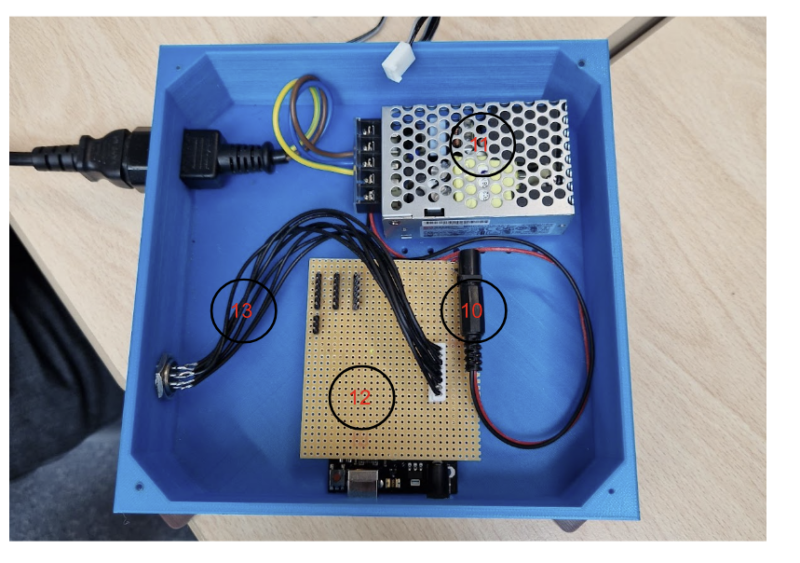
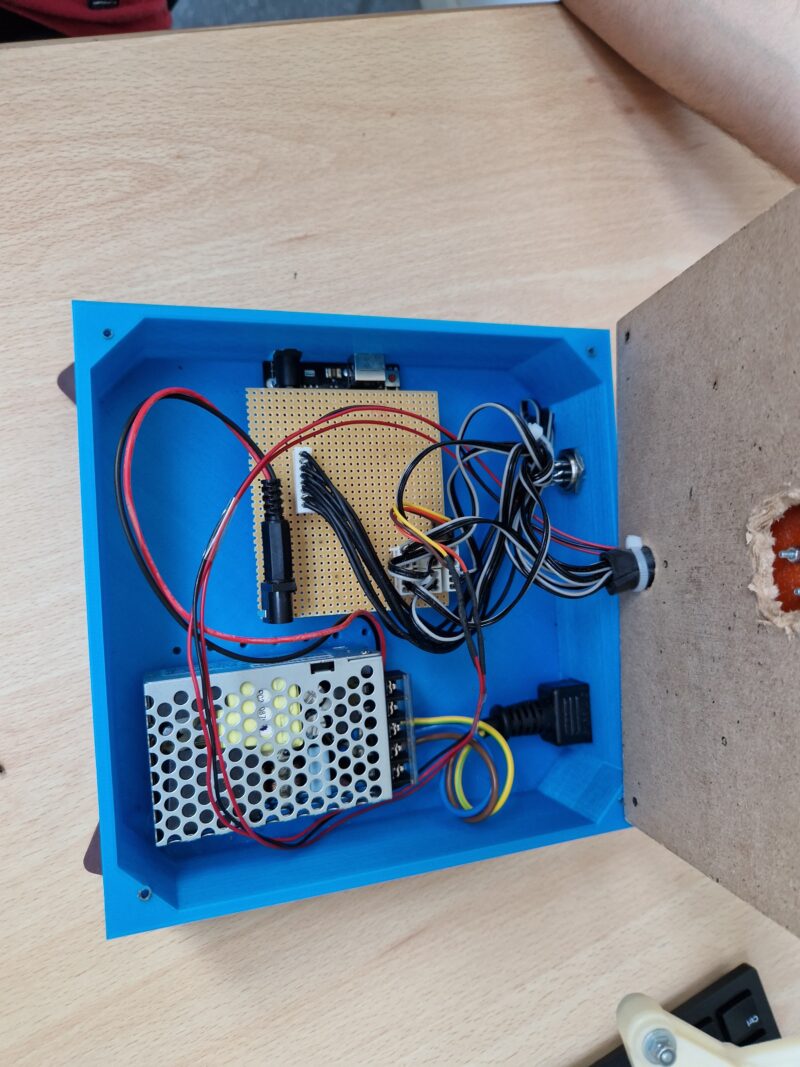
Enfin, un bras de robot ne peut fonctionner si on ne peut pas le contrôler. Pour mettre en place ce système de contrôle, les deux étudiants ont confectionné une boîte en 3D qui sert de socle au robot. Cette boîte contient l’ensemble du système de câblage électrique du bras de robot. Elle est le « cerveau » de celui-ci où l’ensemble des appareils électriques sont connectés à lacarte Elegoo UNO R3 pour pouvoir, par la suite, contrôler l’ensemble de ces appareils électriques à l’aide d’un code Arduino.
Dans cette boîte, on retrouve donc la carte Elegoo UNO R3, qui est le “cerveau du système”, une prise Jack pour connecter l’alimentation à la carte Elegoo, une alimentation branchée sur une prise 220V qui délivre 5V et 5A, un shield pour connecter les moteurs ainsi que la manette à la carte Elegoo, et un connecteur à 8 broches pour connecter la manette au système (par l’intermédiaire d’un câble à 8 fils).
En image, les différents éléments cités ci-dessus assemblés :
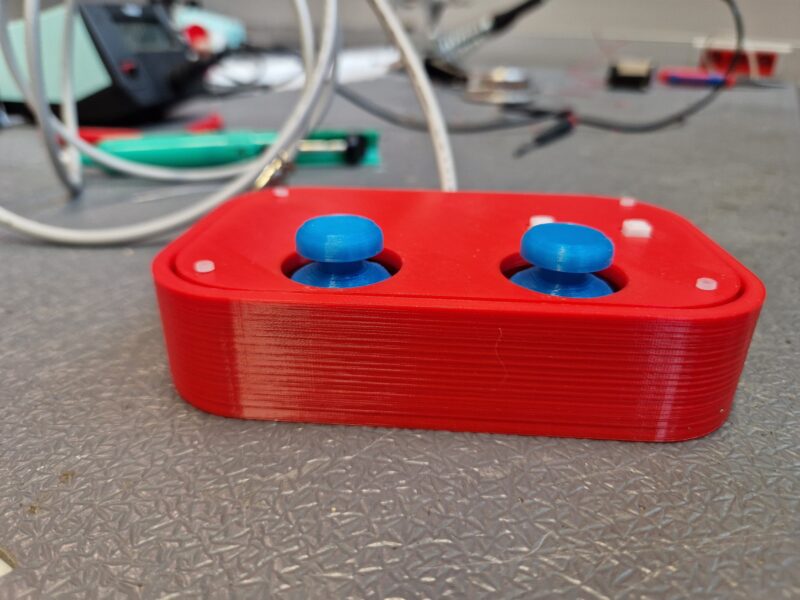
Pour rendre le contrôle du bras de robot plus amusant et ludique, une manette a été fabriquée pour pouvoir contrôler le bras de robot. Cette manette est composée de 2 boutons pour pouvoir ouvrir et fermer la pince de notre bras ainsi que de 2 joysticks pour pouvoir contrôler l’ensemble des articulations du bras. En image, la manette de notre projet (vue de l’extérieur) :

Rendu final du Projet
Ci-joint, une vidéo montrant le résultat final du projet :
Annexe
En accès libre, le code du projet, ainsi que la modélisation 3D de l’ensemble des pièces sur le lien suivant : Google drive