Le projet intitulé « microscopie interférométrique en lumière blanche : mise en place d'outil d'acquisition et de traitement sur Matlab pour la profilométrie de surface, utilisation d'un nouvel algorithme » a été réalisé par Valentin Krafft et Benjamin Kuntz, étudiants en 5ème année de la formation génie électrique par alternance de l'INSA Strasbourg. Valentin Krafft présente les étapes du projet.
Nous avons travaillé dans le cadre de notre projet recherche technologique en 5ème année sur un sujet qui relie l’instrumentation, la physique, la métrologie et le traitement du signal.
Le projet consistait à mettre en place un système d’acquisition (une caméra CMOS Basler et le mouvement fin d’un actionneur piézoélectrique) sous MATLAB, en donnant un accès total aux paramètres de la caméra et de l’actionneur piézoélectrique. L’objectif était double, car il fallait également implémenter un algorithme de traitement appelé FSA pour Five Sample Adaptative non linear algorithm [1].
choix du projet
Nous avons choisi ce sujet, car il nous permet de sortir de notre zone de confort en explorant des domaines plus éloignés de la spécialité génie électrique : c’est une manière pour nous d’élargir nos compétences. L’intitulé général du sujet était : « La microscopie interférométrique en lumière blanche sur plateforme MATLAB ». C’est un sujet à l’interface de la recherche et des sciences pour l’ingénieur. La participation à un projet en lien avec la recherche scientifique est stimulante pour des jeunes ingénieurs en début de carrière.
Le projet a été mené sur la plateforme de physique et vibrations de l’INSA Strasbourg. Ce lieu est fréquenté par les étudiants de l’INSA Strasbourg pour leurs travaux pratiques, ainsi que par les chercheurs de l’unité de recherche ICube, principalement par les chercheurs de l’équipe Instrumentation et procédés photoniques (IPP). Plusieurs microscopes dits interférométriques ont été développés dans cette équipe. Les compétences attendues restent celles d’un d’ingénieur en génie électrique, à savoir :
- analyser et comprendre le principe du système utilisé
- développer un programme permettant l’acquisition
- et réaliser le traitement des données.
Le principe de la microscopie interférométrique
La microscopie interférométrique en lumière blanche est une technique en microscopie utilisant l’aspect ondulatoire de la lumière afin de pouvoir déterminer (par exemple) un profil d’une surface (ou sa topographie). Cette solution utilise les interférences en lumière blanche comme un moyen d’extraction d’informations : il est possible de créer une représentation 3D ou bien 2D de l’état de surface d’un échantillon. Dans notre cas, nous mesurons des variations de hauteurs de quelques microns avec des résolutions axiales de l’ordre d’une dizaine de nanomètres.
quel but ?
L’équipe IPP utilise cet outil comme un moyen de caractérisation en surface ou en profondeur pour des échantillons provenant de différentes applications (texturation laser, micro et nanotechnologies, microélectronique, etc.). L’IPP a développé plusieurs interfaces sur différentes plateformes (Igor Pro de Wavemetrics, Labview de National Instruments) pour le contrôle simultané d’une caméra et d’un actuateur piézoélectrique permettant le mouvement de l’objectif interférométrique. Notre travail est de montrer que l’usage de la plateforme MATLAB est également intéressant pour l’acquisition et le traitement.
Réalisation
Dans le cadre de ce sujet, l’ensemble du système optique et d’acquisition était disponible sur la plateforme. Ce système a été mis au point et développé par Rémy Claveau [2] et Christophe Cordier. Nous disposions donc d’un système interférométrique constitué :
- d’une caméra CMOS Basler avec une liaison USB3 permettant l’acquisition des images,
- d’un actionneur piézoélectrique piloté par le contrôleur E-709 de PI et relié via une liaison USB 2.0,
- d’un objectif interférométrique dit Mirau x10,
- d’un système d’éclairage avec une source de lumière blanche fibrée de Ocean Optics.
La figure 1 décrit le système avec les différents éléments optiques, mécaniques et électroniques.
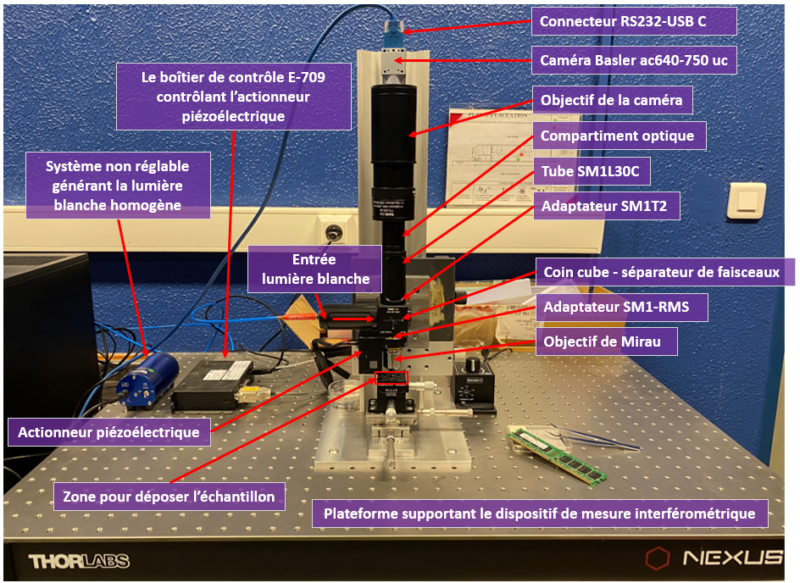
Figure 1 : système d’acquisition à notre disposition
Nous disposions également d’un ordinateur muni de la plateforme MATLAB. L’ordinateur était utilisé auparavant afin de réaliser des topographies avec les méthodes dites PFSM (Peak Fringe Scanning Microscopy) ou PSM (Phase Stepping Microscopy). Dans les premières versions, la caméra devait être paramétrée avant l’acquisition à l’aide du logiciel Pylon Camera Software Suite de Basler (en particulier le temps de pose). Les algorithmes d’acquisition et de traitement étaient réalisés à l’aide du logiciel Igor pro de Wavemetrics ou Labview de National Instruments.
L’algorithme FSA
Cette technique a été développée par Kieran G. Larkin en 1996 [1] : c’est un algorithme qui est très efficace en termes de temps de calcul pour récupérer l’enveloppe des franges d’interférence (obtenues en profondeur).
L’algorithme utilise une formule de modulation et moyenne le bruit par paquet de cinq images : l’algorithme est donc moins soumis aux problématiques liées au bruit. Nous allons présenter cet algorithme avec l’aide de schémas.
L’acquisition
- La première étape de l’algorithme est d’enregistrer un stack d’images à des distances différentes de l’échantillon. L’intervalle entre les deux positions de l’actionneur piézoélectrique correspond à un déphasage de 90° (voir figure 2).
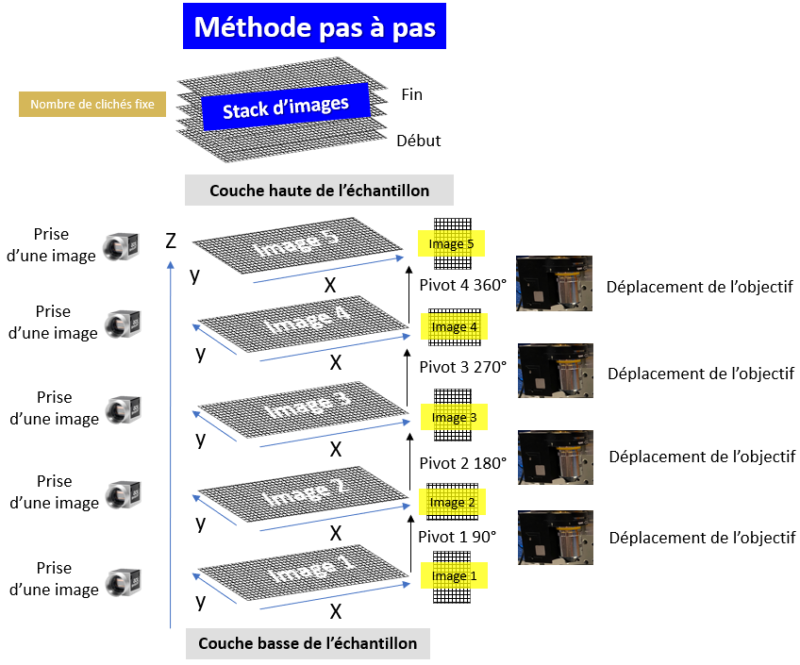
Figure 2 : enregistrement d’une série d’images en déplaçant l’objectif interférométrique
2. Une fois ces images enregistrées dans l’ordinateur, on extrait la valeur de chaque pixel pour chaque image pour une même coordonnée (x,y) du plan. La courbe observée en fonction de la profondeur z est appelée un interférogramme (voir figure 3).
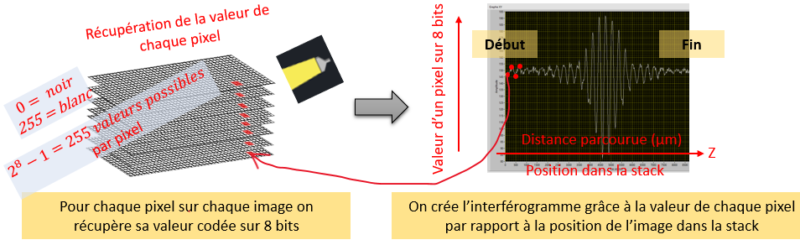
Figure 3 : récupération de la valeur des pixels et création d’un interférogramme
Le traitement
3) Nous construisons ensuite l’enveloppe de cet interférogramme en utilisant la formule de modulation M de la FSA proposée par Larkin (voir figure 4) [1].
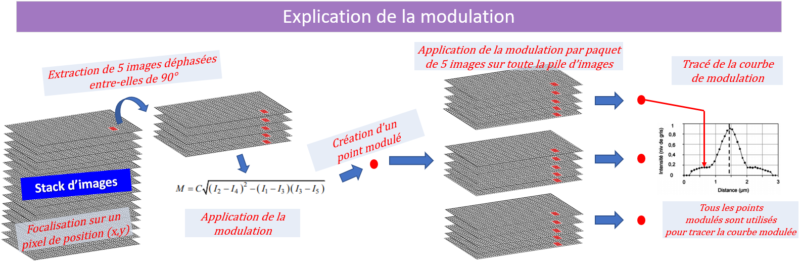
Figure 4 : Modulation par la méthode FSA
4) La courbe modulée est appliquée à l’interférogramme précédent afin de construire son enveloppe (voir figure 5). Il est également possible de faire une détection d’enveloppe par différentes techniques de traitement du signal.
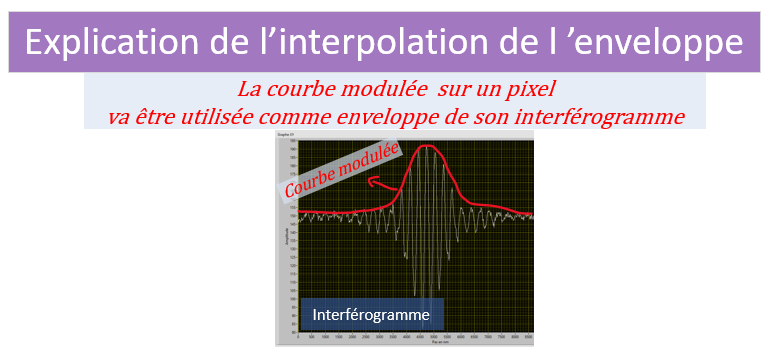
Figure 5 : enveloppe de l’interférogramme
5) On regarde ensuite la coordonnée Z à laquelle se trouve le maximum de l’enveloppe de l’interférogramme. Il ne reste plus qu’à mettre en corrélation la coordonnée Z avec la dimension d’un pas pour permettre d’exploiter le résultat et déterminer la hauteur de l’échantillon (voir figure 6).
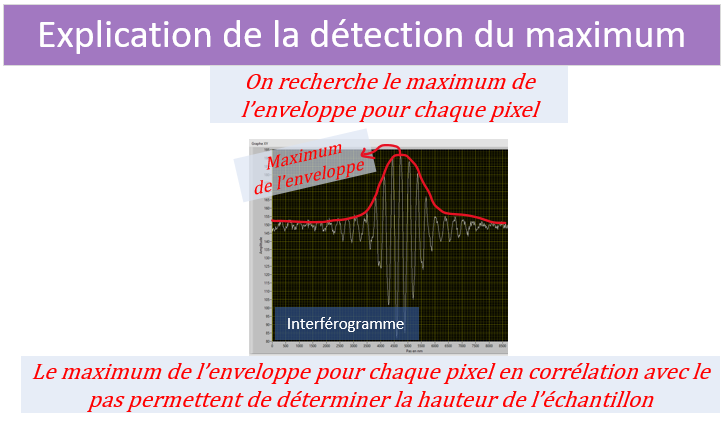
Figure 6 : détermination de la hauteur
6) Il ne reste plus qu’à afficher les résultats de l’acquisition et du traitement de l’algorithme sous forme 2D et 3D (voir figure 7).
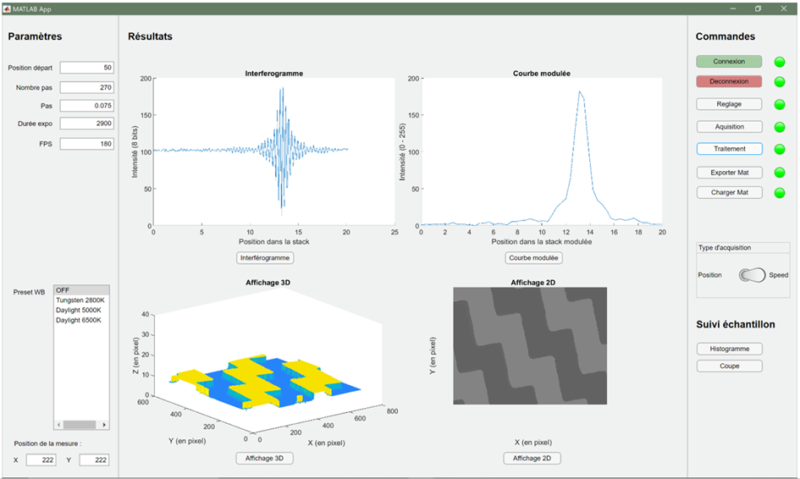
Figure 7 : notre interface graphique : résultats avec un échantillon de silicium
Notre interface graphique est constituée de trois panneaux.
- Le premier panneau permet le réglage des paramètres de l’acquisition.
- Le second panneau donne l’affichage des résultats.
- Le troisième panneau permet de réaliser les commandes.
Notre application permet également de choisir entre une acquisition en mode position (step by step) ou en mode dit vidéo. Un voyant est présent à côté de chaque bouton de commande afin de savoir si l’opération est en cours. Après une acquisition et le traitement d’un ensemble d’images, il est possible d’exporter ces images. Il est aussi possible d’analyser et de traiter directement l’ensemble des images acquises. Notre application permet également de visualiser l’histogramme du résultat, ainsi que d’afficher une vue en coupe.
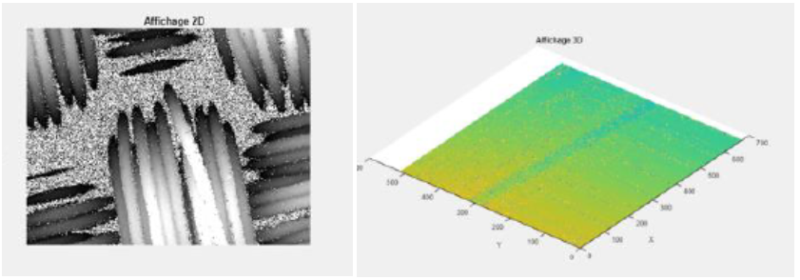
Figure 8 : quelques résultats obtenus durant notre projet. À gauche : une tresse métallique. Les niveaux de gris représentent les hauteurs. À droite : une surface de verre sur un capteur d’imprimante. On observe une probable rayure et de la rugosité.
Applications
Les applications de notre outil sont variées : la vue en coupe peut être utilisée pour analyser un profil en profondeur. En effet, il est possible de faire également des mesures en profondeur avec cette technique sur des milieux transparents. C’est en ce sens que nous avons implémenté en fin de projet l’histogramme et la vue en coupe dans notre outil. La rapidité d’acquisition et de traitement de notre algorithme va permettre aux chercheurs de pouvoir faire des analyses et des études sur des échantillons particuliers, comme le séchage de matériaux polymères. Toutefois, la mesure peut devenir complexe, avec des reliefs très profonds ou si l’échantillon est constitué de plusieurs matériaux avec des couches différentes. L’analyse des interférogrammes devra se faire avec vigilance.
Le projet de recherche technologique nous permet de percevoir un autre domaine que les matières enseignées en cours. Il faut faire preuve de curiosité, d’ingéniosité et de travail. Une majorité de ce que l’on a pu voir était nouveau pour nous. Nous avons pu apprendre de nouvelles choses et surtout une nouvelle méthode de travail afin d’aborder un sujet en lien avec la recherche.
Manuel Flury, maître de conférences HDR et responsable adjoint de l’équipe de recherche IPP et Christophe Cordier nous ont aidés dans nos travaux. Nous souhaitons donc les remercier pour leurs disponibilités et leurs aides.
Références
[1] Abderrazzaq Benatmane, Développement de la microscopie interférométrique pour une meilleure analyse morphologique des couches minces et épaisses des matériaux semiconducteurs et optiques. Thèse de doctorat en Science pour l’ingénieur, spécialiste : instrumentation et microélectronique. Strasbourg : Université Louis Pasteur, 2002, 195 p. Disponible en ligne.
[2] Remy Claveau, Caractérisation spectrale locale à l’aide de la microscopie interférométrique : simulations et mesures. Thèse de doctorat en Science pour l’ingénieur, spécialité : électronique, photonique et microélectronique. Strasbourg : Université de Strasbourg, 2017, 223 p. Disponible en ligne.